We first heard about [Robert Stephenson]’s robotic baby dinosaur a few years ago, and recently he made some upgrades.
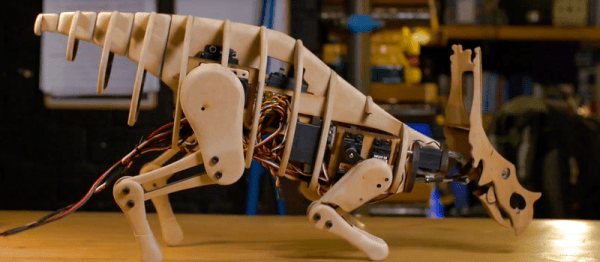
Roboceratops V2 uses 10 servos in the jaw, neck, tail, and front and back legs with 16 degrees of freedom—the two front legs each got an additional degree of freedom in the upgrade. [Robert] is currently in the process of swapping out the Hitec HS645 MGs for higher-torque New Power XLDs.
The older version had aluminum legs covered with upholstery foam, but [Robert] has refined the design. The head, body, and legs are made from laser-cut MDF sanded to give a more natural, bone-like rounding. Finally, to better make use of the new servos [Robert] rewrote the gait engine, giving Robosaurus a more natural motion as it adjusts its center of gravity with each step.
So, for the next version are we all on board for simulated skin?

 Before the group arrived, the native dinos didn’t do much else than run a preprogrammed routine when triggered by someone’s presence… which needless to say, lacks the appropriate prehistoric dynamism. Seeing that their dated wag, wiggle, and roar response could use a fresh breath of flair, the park’s technical projects coordinator [Mark Butler] began adapting one of the dinosaur’s control boxes to work with a Raspberry Pi. This is when [Lucy] and her group were called upon for a two-day long excursion of play and development. With help and guidance from Raspberry Pi expert, [Neil Ford], the group learned how to use a ‘drag and build’ programing environment called
Before the group arrived, the native dinos didn’t do much else than run a preprogrammed routine when triggered by someone’s presence… which needless to say, lacks the appropriate prehistoric dynamism. Seeing that their dated wag, wiggle, and roar response could use a fresh breath of flair, the park’s technical projects coordinator [Mark Butler] began adapting one of the dinosaur’s control boxes to work with a Raspberry Pi. This is when [Lucy] and her group were called upon for a two-day long excursion of play and development. With help and guidance from Raspberry Pi expert, [Neil Ford], the group learned how to use a ‘drag and build’ programing environment called 










