
Unlike football/soccer and foosball, basketball doesn’t really lend itself to being turned into a tabletop game quite that easily. [The Q] has found a way around that, employing tentacle mechanisms to create a two-player, basketball-like game.
Each player uses a pair of two-axis control sticks and a foot pedal to operate a cable-driven tentacle with a gripper on the end. These are two stage tentacles, meaning that the top and bottom halves are independently controlled. The tentacles consist of a series of laminated foam discs clued onto bicycle cable sleeves. The cables are open in the section they control, and operate in a push-pull arrangement. The spring-loaded grippers are operated by the foot pedals, with a single cable running down the center of the tentacle.
The game looks quite fun and challenging, and we can imagine it being even more entertaining with teams of two or three people operating each tentacle. Add a bit of alcohol to adult players, and it might become downright hilarious, although the mechanisms would need to be beefed up a bit to survive that level of punishment.
We suspect [The Q] read [Joshua Vasquez]’s incredibly detailed three-part guide on two-stage tentacle mechanisms. Combine that with his guide to cable mechanism math, and you’d be well-equipped to build your own. Continue reading “Tabletop Basketball With Tentacles”



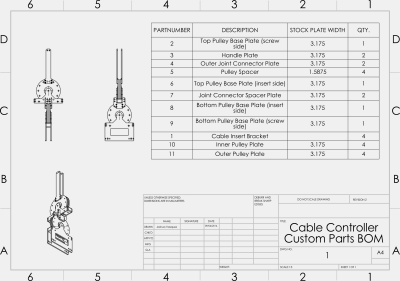 In a good-ol’ engineers-for-engineers fashion, I’m doing something a little different for this post: I’m finishing off this series with a set of assembly videos, a BOM, and the original CAD files to make that beast on the front page come to life. As for why, I figured: why not? Even though these mechanisms have lived in the robotics community and film industry for years, they’re still lacking the treatment of a solid, open design. This is my first shot at closing that gap. Get yourself a cup of coffee. I’m about to give you every bleeding detail on the-how-and-why behind these beasts.
In a good-ol’ engineers-for-engineers fashion, I’m doing something a little different for this post: I’m finishing off this series with a set of assembly videos, a BOM, and the original CAD files to make that beast on the front page come to life. As for why, I figured: why not? Even though these mechanisms have lived in the robotics community and film industry for years, they’re still lacking the treatment of a solid, open design. This is my first shot at closing that gap. Get yourself a cup of coffee. I’m about to give you every bleeding detail on the-how-and-why behind these beasts.








