We’ve probably all had a few conversations with people who hold eccentric scientific ideas, and most of the time they yield nothing more than frustration and perhaps a headache. In [Bertrand Selva]’s case, however, a conversation with a flat-earth believer yielded a device that uses a pair of gyroscopes to detect earth’s rotation, demonstrating that rotation exists without the bulkiness of a Foucalt pendulum.
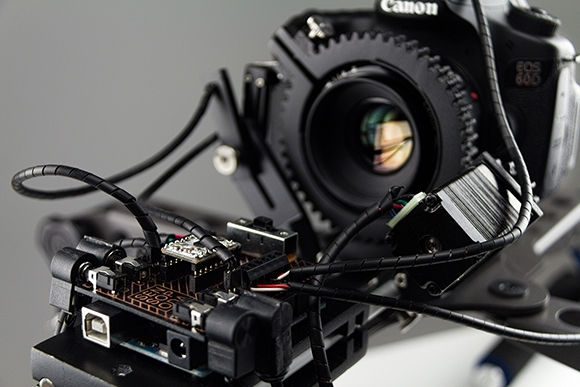
[Bertrand] built his apparatus around a pair of BMI160 MEMS gyroscopes, which have a least significant bit for angular velocity corresponding to 0.0038 degrees per second, while the earth rotates at 0.00416 degrees per second. To extract such a small signal from all the noise in the measurements, the device makes measurements with the sensors in four different positions to detect and eliminate the bias of the sensors and the influence of the gravitational field. Before running a test, [Bertrand] oriented the sensors toward true north, then had a stepper motor cycle the sensors through the four positions, while a Raspberry Pi Pico records 128 measurements at each position. It might run the cycle as many as 200 times, with error tending to decrease as the number of cycles increases.
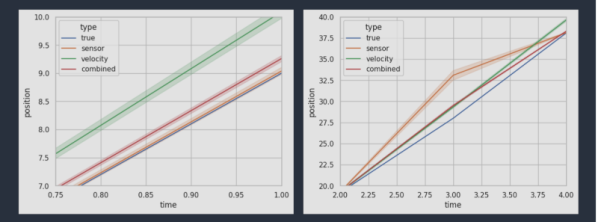
A Kalman filter processes the raw data and extracts the signal, which came within two percent of the true rotational velocity. [Bertrand] found that the accuracy was strongly dependent on how well the system was aligned to true north. Indeed, the alignment effect was so strong that he could use it as a compass.
In the end, the system didn’t convince [Bertrand]’s neighbor, but it’s an impressive demonstration nonetheless. This system is a bit simpler, but it’s also possible to measure the earth’s rotation using a PlayStation. For higher precision, check out how the standards organizations manage these measurements.