Despite what we may have seen in the new Winnie the Pooh movie, our cherished plush toys don’t usually come to life. But if that’s the goal, we have ways of making it happen. Like these “robotic skins” from Yale University.
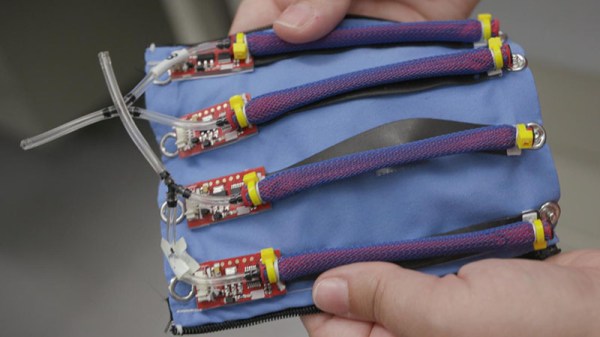
Each module is a collection of sensors and actuators mounted on a flexible substrate, which is then installed onto a flexible object serving as structure. In a simple implementation, the mechanical bits are sewn onto a piece of fabric and tied with zippers onto a piece of foam. The demonstration video (embedded below the break) runs through several more variations of the theme. From making a foam tube (“pool noodle”) crawl like a snake to making a horse toy’s legs move.
There’s a serious motivation behind these entertaining prototypes. NASA is always looking to reduce weight that must be launched into space, and this was born from the idea of modular robotics. Instead of actuators and sensors embedded in a single robot performing a specific function, these robotic skins can be moved around to different robot bodies to perform a variety of tasks. Such flexibility can open up more capabilities while occupying less weight on the rocket.
This idea is still early in development and the current level prototypes look like something most of us can replicate and improve upon for use in our projects. We’ve even got a controller for those pneumatics. With some more development, it may yet place among the ranks of esoteric actuators.
Continue reading “Turn Your Teddy Bear Into A Robot With Yale’s “Robotic Skin””