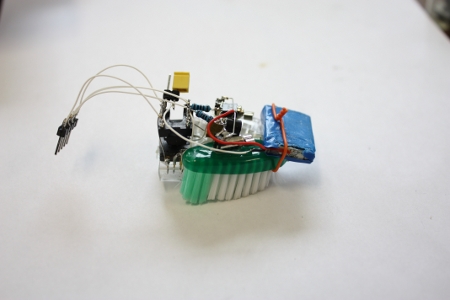
[sprite_tm], whose projects we have covered in the past, took the popular bristlebot to an extreme and created a controllable version. A bristlebot consists of a small vibrating motor mounted with a battery on the head of a toothbrush. These micro-robots buzz around randomly, and he attempted to tame them. He used a platform of twin bristlebots and added an optical sensor from a laser mouse and an ATtiny13. The optical sensor is used to determine the relative motion of the robot, so that the motors can be adjusted accordingly. He also has a video of the bot using the sensor to find a mark on the floor and stay within bounds. Although it isn’t as accurate, it acts like a traditional line-following robot.