There’s just something about the idea of robots turning into everyday objects that fascinates us all. It seems Japan outdoes the world in that category, and the J-Deite project is no exception. J-Deite Quarter is the first transforming robot to come from the collaborative project between [Kenji Ishida] of Brave Robotics, [Watur Yoshizaki] of Asratec Corp., and Tomy Co. Ltd. If Brave Robotics sounds familiar, that’s because this isn’t the first transforming robot [Kenji Ishida] has produced, nor the first featured on Hackaday.
The J-Deite Quarter weighs 77lbs (35kg) and can run for an hour on a single battery charge. It’s joints are powered by Futaba servos. It is controlled by the proprietary V-SIDO OS designed by [Watur Yoshizaki]. As a robot, it stands at 4.25 feet (1.3m). It walks at a rather slow speed of 0.6mph (1km/hr). It has several points of articulation; it can bend its arms and flex its fingers. In less than 30 seconds, the robot transforms into an equally long two-seat sports car with a maximum speed of just over 6mph (10km/hr). Overall, the J-Deite Quarter is no speed demon, but it is noteworthy for being functional in both forms.
The web site has a cute backstory featuring a green meteorite that allows the “real” J-Deiter to communicate with the developers trying to create a robot in its image. Along with the video, it resembles a marketing ploy for a toy, which could explain Tomy’s involvement. After all, Tomy, along with Hasbro, developed the original Transformers toy line. Unfortunately, the J-Deiter Quarter is just a prototype, with no plans for mass production at this time. Instead, the project’s focus is on making a bigger and better J-Deiter. There are plans for a J-Deiter Half (8-foot-tall) to be developed by 2016, with the final goal of creating a 16-foot-tall transforming robot by 2020.
Enjoy the video that shows what J-Deite Quarter is capable of (with added sound effects, of course) after the break. Now, if you’ll excuse me, I have a sudden hankering to watch some Transformers and Voltron cartoons.
[via SimpleBotics]
Continue reading “Meet J-Deite Quarter, The 4-Foot-Tall Transformer” →

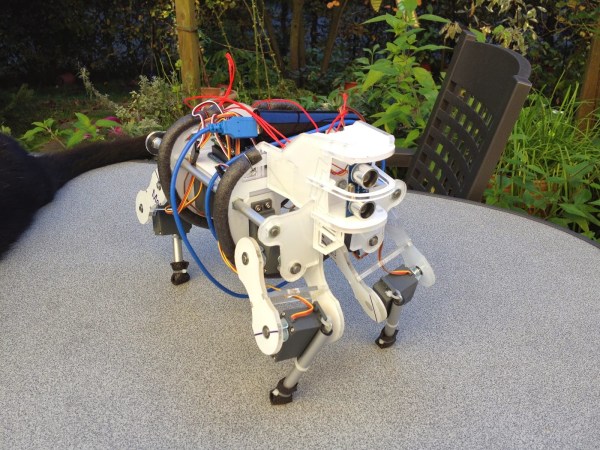
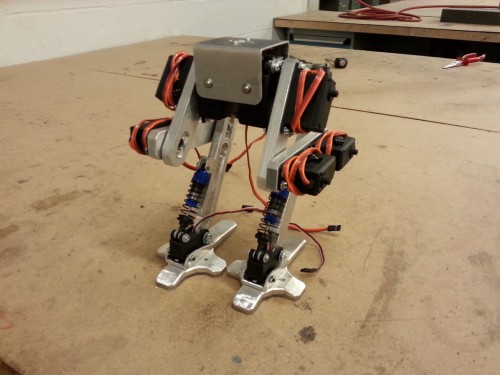
 [Max] designed all of the mechanical parts himself. After weighing the advantages and disadvantages of different materials, he decided that the frame would be made from 5mm acrylic sheet. The main body of the robot has acrylic ribs that are spaced apart by threaded rods. Twelve RC servos make up all of the joints, 3 in each leg. Notice in this photo how there is one servo that immediately rotates another servo. To support the other side of the rotating servo, [Max] epoxied on a T-nut, stuck in a short length of threaded rod which is then supported in the frame by a ball bearing. Simple and effective! The upper portions of the legs are also made from acrylic sheet and the lower legs are from a cheap camera tripod. Rubber feet ensure a slip resistant stance.
[Max] designed all of the mechanical parts himself. After weighing the advantages and disadvantages of different materials, he decided that the frame would be made from 5mm acrylic sheet. The main body of the robot has acrylic ribs that are spaced apart by threaded rods. Twelve RC servos make up all of the joints, 3 in each leg. Notice in this photo how there is one servo that immediately rotates another servo. To support the other side of the rotating servo, [Max] epoxied on a T-nut, stuck in a short length of threaded rod which is then supported in the frame by a ball bearing. Simple and effective! The upper portions of the legs are also made from acrylic sheet and the lower legs are from a cheap camera tripod. Rubber feet ensure a slip resistant stance.