What is a hacker, if not somebody who comes up with solutions that other just don’t see? All the pieces may be in place, but it takes that one special person to view the pieces as greater than the sum of their parts. As [Chris Staecker] explains in the video below the break, Henri Genaille was one such person.
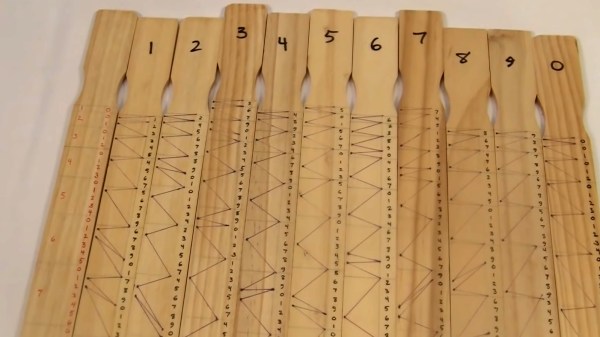
When French mathematician Edouard Lucas (himself well known for calculating the longest prime number found by hand) posed a mathematical problem at the French Academy, a French railway engineer named Henri Genaille developed the rods we’re discussing now.
Genaille’s Rods are designed to perform multiplication. But rather than require computation by the user, the rods would simply need to be laid out in the correct order. The solution could readily be found by just following the lines in the correct pattern. This might sound a lot like cheating, and that’s exactly what it is. No manual math needed to be done. Genaille also created rods for doing long division, which we’re sure were every bit as enthralling as the multiplication rods. Demonstrations of both are included in the video below.
While Genaille’s Rods have gone the way of the slide rule, we can’t help but wonder how many engineers and scientists carried around a set of marked up wooden sticks in their pocket protector.
If designing and building manual mathematical machines is something that you think really adds up to a good time, check out this post on how to design and build your own circular slide rule!
Continue reading “Genaille’s Rods: When Paint Sticks Do Math”