The word “algorithm” can sometimes seem like a word designed to scare people away from math classes, much like the words “calculus”, “Fourier transform”, or “engineering exam”. But in reality it’s just a method for solving a specific problem, and we use them all the time whether or not we realize it. Taking a deep dive into some of the ways we solve problems, especially math problems, often leads to some surprising consequences as well like this set of algorithms for performing various calculations using nothing but a checkerboard.
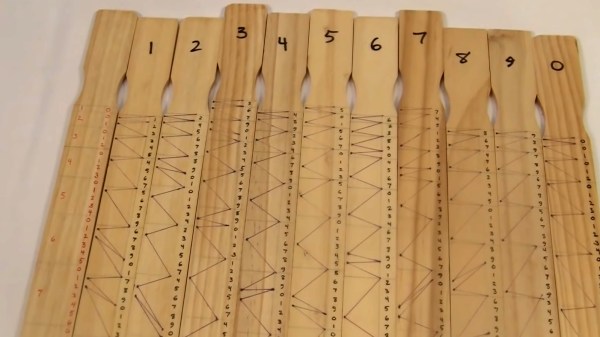
This is actually a demonstration of a method called location arithmetic first described by [John Napier] in 1617. It breaks numbers into their binary equivalent and then uses those representations to perform multiplication, division, or to take the square root. Each operation is performed by sliding markers around the board to form certain shapes as required by the algorithms; with the shapes created the result can be viewed directly. This method solves a number of problems with other methods of performing math by hand, eliminating other methods like trial-and-error. The video’s creator [Wrath of Math] demonstrates all of these capabilities and the proper method of performing the algorithms in the video linked below as well.
While not a “hack” in the traditional sense, it’s important to be aware of algorithms like this as they can inform a lot of the way the world works on a fundamental level. Taking that knowledge into another arena like computer programming can often yield some interesting results. One famous example is the magic number found in the code for the video game Quake, but we’ve also seen algorithms like this used to create art as well.