Yakov Smirnoff used to say, “In America, you can always find a party. In Soviet Russia, Party finds YOU!!” Only here, it’s a laser rangefinder.
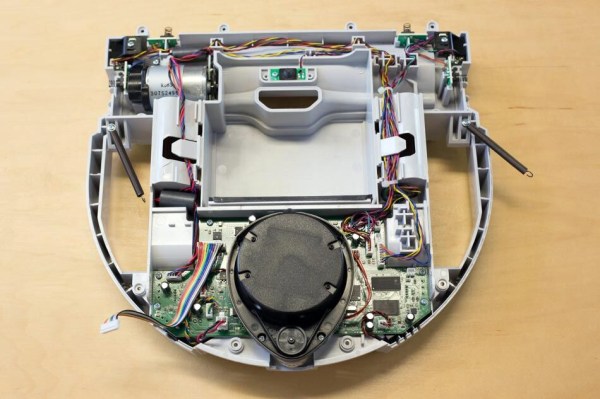
In this project (automatic translation), [iliasam] makes his own scanning laser rangefinder, like the ones that we’ve seen in fancy vacuum cleaners. But he does it from scratch.
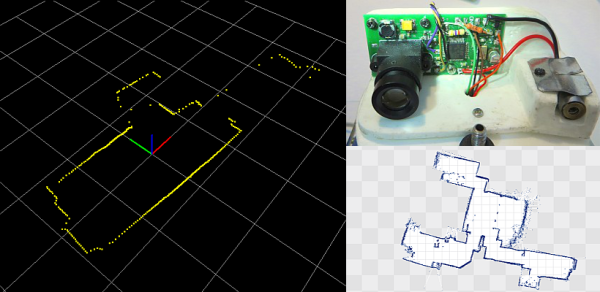
 While this sort of thing is easy if you have a webcam and a ton of processing power to throw at it, [iliasam] takes the hard way out — measuring the parallax of the reflected spot through a lens on a linear image sensor (which renders as “photodetector line” in translated Russian).
While this sort of thing is easy if you have a webcam and a ton of processing power to throw at it, [iliasam] takes the hard way out — measuring the parallax of the reflected spot through a lens on a linear image sensor (which renders as “photodetector line” in translated Russian).
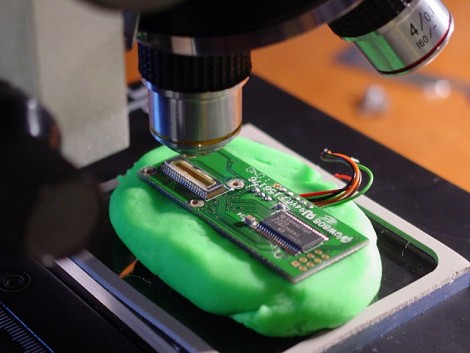
Linear image sensors are a lot like the elements in your CMOS digital camera, with the exception that the elements are arranged in a line instead of a plane, and they’re a lot easier to interface with a microcontroller. Hold a data line high to take an exposure, and then clock out the (analog) voltage values that correspond to the amount of light that hit each cell in the line array. While [iliasam] paid an estimated $18 for his, we’ve found them much cheaper on eBay. And there’s usually a linear sensor, often RGB and complete with driver circuitry, in a scanner if you take one apart. This could be done for just a few bucks if you were thrifty.
Continue reading “In Soviet Russia, DIY Laser Rangefinder Scan YOU!!”