So you want to minimize finger movement when you type, but don’t have three grand to drop on an old DataHand, or enough time to build the open-source lalboard? Check out these two concept keebs from [SouthPawEngineer], which only look like chord boards.
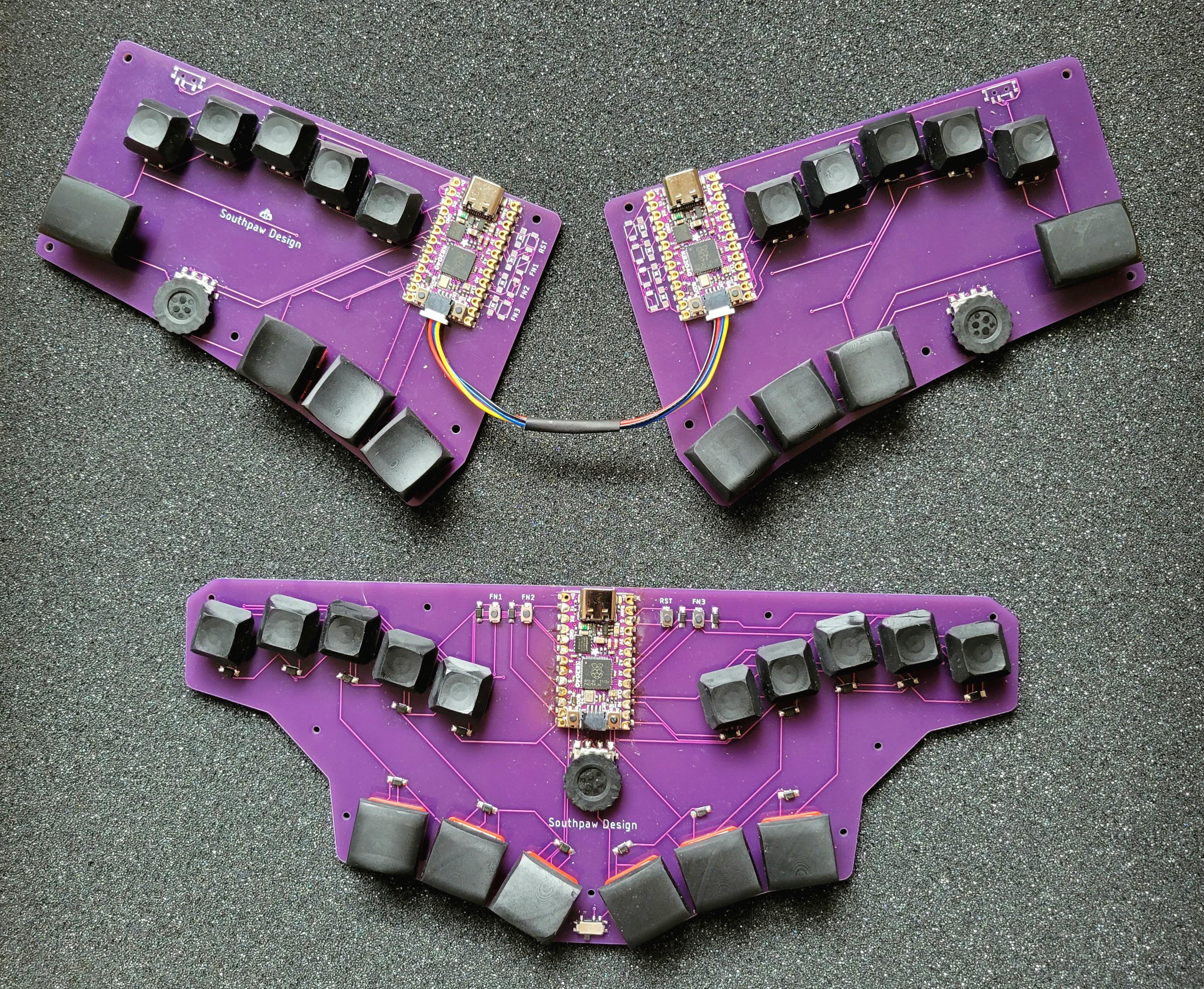 Every key on the home row is a five-way switch — like a D-pad with straight down input. [SouthPawEngineer] has them set up so that each one covers a QWERTY column. So like, for the left pinky switch, up is Q, right is A, down is Z, and left is 1. Technically, the split has 58 keys, and the uni has 56.
Every key on the home row is a five-way switch — like a D-pad with straight down input. [SouthPawEngineer] has them set up so that each one covers a QWERTY column. So like, for the left pinky switch, up is Q, right is A, down is Z, and left is 1. Technically, the split has 58 keys, and the uni has 56.
Both of these keebs use KB2040 boards, which are Adafruit’s answer to the keyboard-building craze of these roaring 2020s. These little boards are of course easy to program with CircuitPython, which supports KMK, an offshoot of the popular QMK. Thanks for the tip, [foamyguy]!
Continue reading “Keebin’ With Kristina: The One With The Ballpoint Typewriters”