What is it that’s not quite either a plane or a boat, but has characteristics of both? There are probably a lot of things that fit that description, but the one that [Nick Rehm] is working on is known as an ekranoplan. Specifically, he’s looking to make the surface-skimming ground-effect vehicle operate autonomously.
If you think you’ve heard about ekranoplans around here before, you’d be right — we’ve covered a cool LIDAR-controlled model ekranoplan that [rctestflight] worked on about a year ago, and more recently, [ThinkFlight]’s attempts to make an autonomous ekranoplan that can follow behind a boat. The latter is where [Nick] enters the collaboration, and the featherweight foam ground-effect vehicle shown in the video below is his test platform.
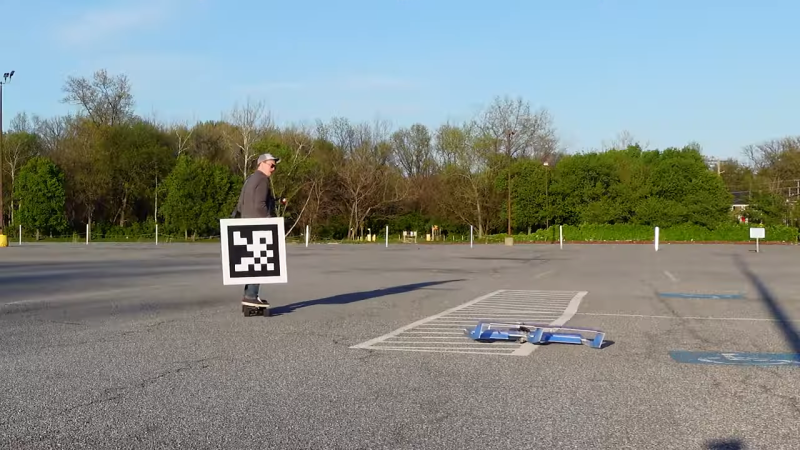
After sorting out the basic airframe design and getting the LIDAR integrated, he turned his attention to the autonomous bit, which relies on a Raspberry Pi 4 running ROS and a camera with a wide-angle lens. The Pi uses machine vision algorithms to find an “AprilTag” fiducial marker in the scene, which gives the flight controller information about the relative orientation of the ekranoplan to the tag. [Nick] tested tag tracking using an electric longboard, and the model ekranoplan did an admirable job of not only managing the ground-effect, but also staying on target right behind him. And hats off to [Nick] for keeping all the balls in the air and not breaking his neck in the process.
We’re looking forward to seeing what [Nick] built here end up in [ThinkFlight]’s big ekranoplan build. Ground-effect vehicles like these are undeniably cool, and it seems like they’ve got the potential to solve some interesting transportation problems.














Chinese drones can track you without QR for years now.
US Drones can do that too.
What interesting transportation problems does this solve? If I recall correctly, full-size ekranoplans blew out their own brief candle by combining the worst characteristics of planes in the water (needs smooth water, nature doesn’t cooperate reliably, drowns its passengers and cargo when anything goes wrong) and boats in the air (boats being notably bad at flying).
If you fly off water, you want small chop, just say no to waves of any size unless you are running between swells.
You’re confusing the class of craft known as WIGE (Wing in Ground Effect) with flying boats.
Not really, they might not be as easy to use as you’d hope but in terms of potential effectiveness they are not bad, able to lift massively heavy loads, and travel at good pace – its more like gaining some of the benefits of being a cargo ship while traveling at more aircraft speeds.
The thing that really kills them isn’t that the WIG effect isn’t good enough, as at least at any larger scale its more than capable of dealing with rough water, or drowning when anything goes wrong, though no doubt that could happen the big ones I know of anyway were all designed as flyingboat so do that strange thing of floating pretty damn well, as their enormous fuselage really is a boat hull.
What really kills them is they are just plain hard to use efficiently – the wings might only be stumpy but they are still pretty big and stick out more than enough – making loading and unloading much more challenging, and they don’t really bring much to the table over regular aircraft and cargo ships – normal aircraft can really fly so take the direct routes no matter the destination, and cargo ships can carry vastly more – slower and use more fuel pushing all that water out the way for the same sort of capacity, but you can scale them up a great deal without scaling up the fuel costs as much, and maintaining a footprint that actually fits in normal dockside infrastructure.
In many ways its the same sort of reason you don’t see many hovercraft around, not because they are not superb bits of kit but that they are rather more specifically really great at something you can do well enough other more versatile or convenient ways. For instance if there was a real need to transport heavy objects across The Pond quickly and often they obviously would be hands down winners – they would be able to carry way more than cargo aircraft, so less trips required and being a direct route over water the whole way normal aircraft don’t make any gains there. They would also get there way faster than the boat could, and being a dedicated route special docking infrastructure to make loading/unloading easy and fast could easily be built for them. But they would then be nearly hopeless if you instead needed to go directly across the the NA continent, or cross France to get into the Med – might be able to fly well enough to do so, but its not going to be the choice still, you would go round Spain etc staying over water instead, and then when you got there without the specialist infrastructure to aid in unloading…
Also actually getting them into the air in the first place requires a great deal of power, as you still have the boat problem of pushing through all that water to get up to speed.
It looks like a dedicated video + compute stick is necessary to really in crease detection time in a small package. I have recently been playing with the OAK D-Lite . And for $100, it’s REALLY interesting : https://docs.luxonis.com/projects/hardware/en/latest/pages/DM9095.html
I think it might be able to replace a lot of the heavy lifting you’re doing on the raspi and offload it to this camera and “compter vision swiss army knife”.
Aawww, I tried to buy one of those, but the cc clearinghouse didn’t like my debit card.
Ah yes, the ideal form of yaw control for one motor out controlled approaches. ;-)