GPS is an enabling technology that does far more than the designers ever dreamed. If you want a quadcopter to fly to a waypoint, GPS does that. If you want directions on your phone, GPS does that. No one in the 70s or 80s could have dreamed this would be possible.
GPS, however, doesn’t work too well indoors. This is a problem, because we really don’t know what is possible if we can track an object to within 10cm indoors. Now there’s a module that does just that. It’s the decaWave DWM1000.
This module uses an 802.15 radio to track objects to within just a few centimeters of precision. It does this by sending time stamps to and from a set of base stations, or ‘anchors’. The module is also a small, and relatively high bandwidth (110kbps) radio for sensors and Internet of Things things makes it a very interesting part.
Some of the potential for this module is obvious: inventory management, and finding the remote and/or car keys. Like a lot of new technology, the most interesting applications are the ones no one has thought of yet. There are undoubtedly a lot of applications of this tech; just about every ball used in sports is bigger than 10cm, and if ESPN ever wanted even more cool visuals, just put one inside.
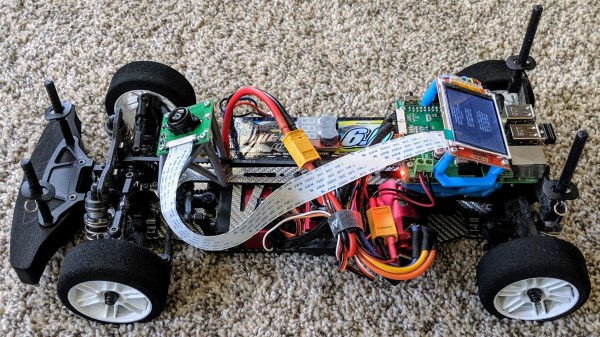
[Andy]’s robot is an autonomous RC car, and he shares the localization algorithm he developed to help the car keep track of itself while it zips crazily around an indoor racetrack. Since a robot like this is perfectly capable of driving faster than it can sense, his localization method is the secret to pouring on additional speed without worrying about the car losing itself.
The regular pattern of ceiling lights makes a good foundation for the system to localize itself.
To pull this off, [Andy] uses a camera with a fisheye lens aimed up towards the ceiling, and the video is processed on a Raspberry Pi 3. His implementation is slick enough that it only takes about 1 millisecond to do a localization update, netting a precision on the order of a few centimeters. It’s sort of like a fast indoor GPS, using math to infer position based on the movement of ceiling lights.
To be useful for racing, this localization method needs to be combined with a map of the racetrack itself, which [Andy] cleverly builds by manually driving the car around the track while building the localization data. Once that is in place, the car has all it needs to autonomously zip around.
Interested in the nitty-gritty details? You’re in luck, because all of the math behind [Andy]’s algorithm is explained on the project page linked above, and the GitHub repository for [Andy]’s autonomous car has all the implementation details.
The system is location-dependent, but it works so well that [Andy] considers track localization a solved problem. Watch the system in action in the two videos embedded below.
Outdoor navigation is a problem that can be considered solved for decades or maybe even centuries, depending on the levels of accuracy, speed and accessibility required. Indoor navigation and location, on the other hand, is a relatively new field and we are still figuring it out. Currently there are at least four competing technologies pushed by different manufacturers. One is ultra wide band radio and [Marco van Nieuwenhoven] shows us what a beacon using this technology is made of.
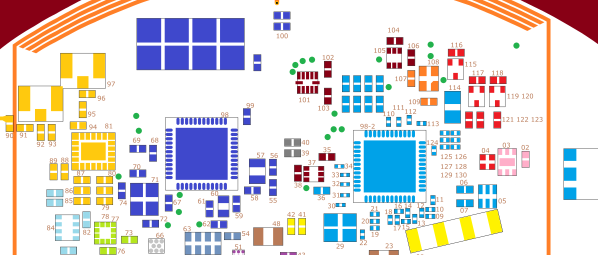
In his thorough tear down of an Estimote location beacon, he comes up with a complete parts list and schematics for each of the four PCB layers. The beacons are controlled by a Cortex M4 and feature Bluetooth radio in addition to the UWB part. They also come with a three-axis accelerometer, temperature, ambient light and pressure sensors and NFC capability. These boards combine a lot of functionality in a compact package and [Marco]’s stated intent is to create an open source firmware for them.
Hacking proprietary hardware, especially when doing so in public may get you in legal trouble, but in this case [Marco] has contacted the manufacturer, and the relationship seems to be friendly so far. Let’s hope it stays that way; these things look like a promising platform and may become a lower cost alternative to the evaluation kit running the same UWB radio we featured earlier. Alternatively you could ditch the UWB and use WiFi for indoor location.
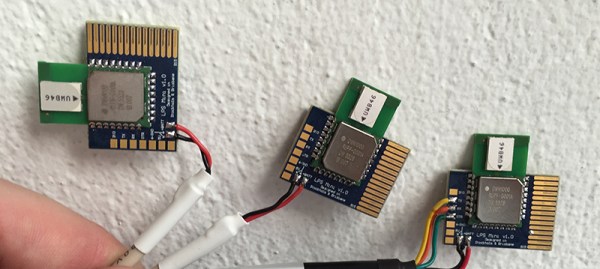
Robots of the future will be in the home, and ready to do whatever job we tell them to do. But they’ll need to know where they are within the house. Dead reckoning with accelerometers and gyroscopes are just a sufficient solution; what we really need is an indoor location service. For his Hackaday Prize entry, [Göran] is doing just that. He’s building a small device that will find its position with 10 cm precision, indoors.
[Göran]’s LPS Mini is built around a very interesting part – the Decawave DWM100. It’s a module that uses an 802.15 radio to trilaterate the distance from several ‘anchors’ to a tag. This, by itself, gives the LPS Mini a navigation system with 10 cm precision. Even higher precision can be accomplished with an IMU gathering accelerometer, gyro, and compass data, and even further with a tiny altimeter. The result is a tiny board that knows exactly where it is.
As far as practical uses go, these LPS Mini boards were used to move beds around an art exhibit at Hayward Gallery in London. While moving beds around an art gallery doesn’t sound like a game-changing invention, think about the uses for GPS in the 1980s – no one could have imagined a chip that would tell you where you are or that could keep a quadcopter on the right heading.
You can check out [Göran]’s video for the LPS Mini below.
GPS-based location services will be around with us forever. If you’re in the outback, in the middle of the ocean, or even just in a neighborhood that doesn’t have good cell coverage, there’s no better way to figure out where you are than GPS. Using satellites orbiting thousands of miles above the Earth as a location service is an idea that breaks down at some very inopportune times. If you’re in a parking garage, you’re not using GPS to find your car. If you’re in a shopping mall, the best way to find your way to a store is still a map. Anyone every tried to use GPS and Google Maps in the hotel/casino labyrinth that is the Las Vegas strip?
[Blecky]’s entry for the Best Product competition of the Hackaday Prize aims to solve this problem. It’s an indoor location service using only cheap WiFi modules called SubPos. With just a few ESP8266 modules, [Blecky] can set up a WiFi positioning system, accurate to half a meter, that can be used wherever GPS isn’t.
The idea for a GPS-less positioning system came to [Blecky] after a caving expedition and finding navigation though subterranean structures was difficult without the aid of cell coverage and GPS. This got [Blecky] thinking what would be required to build a positioning service in a subterranian environment.
A SubPos node, equipped with an ESP8266 WiFi module
The answer to this question came in the form of a cheap WiFi module. Each of the SubPos nodes are encoded with the GPS coordinates of where they’re placed. By transmitting this location through the WiFi Beacon Frame, along with the transmitted power, any cell phone can use three or more nodes to determine its true location, down to a few centimeters. All of this is done without connecting to a specific WiFi network; it’s a complete hack of the WiFi standard to allow positioning data.
The most shallow comparison to an existing geolocation system would be a WiFi positioning system (WPS), but there are several key differences. In WPS, the WiFi APs don’t transmit their own location; the AP is simply cross-referenced with GPS coordinates in a database. Secondly, APs do not transmit their own transmit power – important if you’re using RSSI to determine how far you are from an Access Point.
The best comparison to an indoor location service comes from a new Decawave module that sets up ‘base stations’ and figures out a sensor’s location based on time of flight. This, however, requires additional radios for each device receiving location data. SubPos only requires WiFi, and you don’t even need to connect to an AP to get this location data; everything is broadcast as a beacon frame, and every device with WiFi detects a SubPos node automatically.
As an entry to the Hackaday Prize Best Product competition, there is an inevitable consideration as to how this product will be marketed. The applications for businesses are obvious; shopping malls could easily build a smartphone app showing a user exactly where in the mall they are, and provide directions to The Gap or one of the dozens of GameStops in the building. Because the SubPos nodes also work in 3D space, parking garage owners could set up a dozen or so SubPos nodes to direct you to your exact parking spot. Disney, I’m sure, would pay through the nose to get this technology in their parks.
Already [Blecky] is in talks with one company that would like to license his technology, but he’s not focused only on the high-dollar business accounts. He already has a product that needs manufacturing, and if he wins the Best Product competition, he will be working on something for the hacker/homebrew market. The price point [Blecky] sees is around $15 a node. The economics of this work with the ESP WiFi module, but [Blecky] is also looking at alternative chip sets that would allow for more than just RSSI position finding; an improved version of the SubPos node not based on the ESP-8266 could bring time of flight into the mix, providing better position accuracy while still being cheaper to manufacture than the current ESP-based solution.
[Blecky] has a great project on his hands here, and something we will, undoubtedly, see more of in the future. The idea of using WiFi beacon frames to transmit location data, and received signal strength to suss out a position is groundbreaking and applicable to everything from spelunking to finding your car in a parking garage. Since the SubPos system isn’t tied to any specific hardware, this could even be implemented in commercial routers, giving any device with WiFi true location data, inside or out. It’s also one of the top ten finalists for the Hackaday Prize Best Product competition, and like the others, it’s the cream of the crop.
How do you audit your home Wi-Fi network? Perhaps you log into your router and have a look at the connected devices. Sometimes you’ll find an unexpected guest, but a bit of detective work will usually lead you to the younger nephew’s game console or that forgotten ESP8266 on your bench.
Wouldn’t it be useful if your router could tell you where all the devices connected to it are? If you are [Zack Scholl], you can do all this and more, for his FIND-LF system logs Wi-Fi probe requests from all Wi-Fi devices within its range even if they are not connected, and triangulates their position from their relative signal strengths across several sniffing receivers. These receivers are a network of Raspberry Pis with their own FIND-LF server, and any probe requests they pick up are forwarded to [Zack]’s FIND server (another of his projects) which does the work of collating the locations of devices.
It’s an impressive piece of work, though with a Raspberry Pi at each receiver it could get a little pricey. [Zack] has done other work in this field aside from the two projects mentioned here, his other work includes an implementation of the [Harry Potter] Marauder’s Map.
Despite owning five, including the original Pebble, I’ve always been somewhat skeptical about smart watches. Even so, the leaked news that Fitbit is buying Pebble for “a small amount” has me sort of depressed about the state of the wearables market. Because Pebble could have been a contender, although perhaps not for the reason you might guess.
Pebble is a pioneer of the wearables market, and launched its first smartwatch back in 2012, two years before the Apple Watch was announced. But after turning down an offer of $740 million by Citizen back in 2015, and despite cash injections from financing rounds and a recent $12.8 million Kickstarter, the company has struggled financially.
An offer of just $70 million earlier this year by Intel reflected Pebble’s reduced prospects, and the rumoured $30 to $40 million price being paid by Fitbit must be a disappointing outcome for a company that was riding high such a short time ago.