We’re all used to satellite navigation systems such as GPS or GLONASS, sheer magic in which the combination of a set of reference transmitters and super-accurate timing information can be used to calculate a position to an astounding precision. They had land based predecessors such as LORAN and Decca Navigator which worked in a similar fashion but with fixed land-based reference transmitters. Terra is an attempt to do the same thing without a network of dedicated transmitters, instead using FM broadcast transmitters as its fixed points.
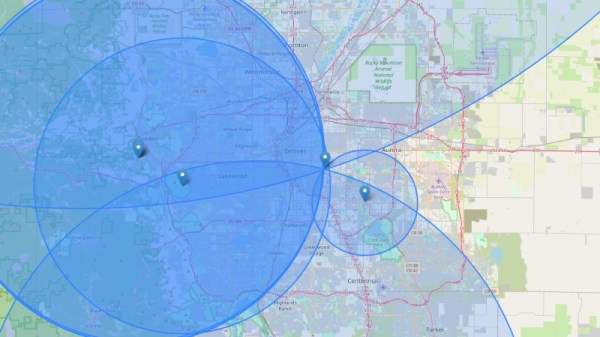
This might seem like an impossible task without access to the transmitters, but they have a workaround using the Internet as a backhaul. Instead of transmitting their timing information like the systems mentioned above, they rely on a set of reference receivers sharing it online to the client’s receiver software. So far they have a demo running in Denver.
The interesting thing about this system is that it’s open-source, and requires only a relatively inexpensive software defined radio receiver and a computer to operate. Now anyone with a group of internet-connected friends to set up reference receivers can have their own positioning system, it’s no longer the exclusive preserve of governments. We like this idea, and we look forward to seeing it being tested more widely.
If you’d like to know where we’ve come from, we’ve taken a look at LORAN before.