We always joke about the hardware guys saying that they’ll fix it in firmware, and vice-versa, but this is ridiculous. When [Igor] tried to update his oscilloscope and flashed the wrong firmware version in by mistake, he didn’t fix it in firmware. Instead, he upgraded the LCD display to match the firmware.
See, Siglent doesn’t make [Igor]’s DSO any more; they stopped using the 4:3 aspect ratio screens and replaced them with wider versions. Of course, this is an improvement for anyone buying a new scope, but not if you’ve got the small screen in yours and can’t see anything anymore. After playing around with flashing other company’s firmware (for a similar scope) and failing to get it done over the JTAG, he gave up on the firmware and started looking for a hardware solution.
It turns out that a few SMT resistors set the output screen resolution. After desoldering the appropriate resistors, [Igor] bought a new 7″ LCD screen online only to find out that it has a high-voltage backlight and that he’d need to build an inverter (and hide the noisy circuit inside his oscilloscope). Not daunted, he went digging through his junk box until he found a backlight panel of the right size from another display.
Yet more small soldering, and he had frankensteined a new backlight into place. Of course, the larger LCD won’t fit the case without some cutting, double-sided tape, and a healthy dose of black tape all around insulates the loose electricals. Et voilá!
We have to hand it to [Igor], he’s got moxie. It’s an ugly hack, but it’s a definite screen upgrade, and a lesser hacker would have stopped after flashing the wrong firmware and thrown the thing in the trash. We’d be proud to have that scope sitting on our desk; it’s a definite conversation starter, and a badge of courage to boot.


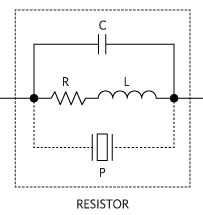 For resistors, you’ll also have to reckon with temperature dependence as well as the same range of piezoelectric and inductance characteristics that capacitors display. Worse, resistors can display variable resistance under higher voltages, and actually produce a small amount of random noise:
For resistors, you’ll also have to reckon with temperature dependence as well as the same range of piezoelectric and inductance characteristics that capacitors display. Worse, resistors can display variable resistance under higher voltages, and actually produce a small amount of random noise: