Small brushless motors and LiPo batteries are one of the most impressive bits of technology popularized in recent years. Just a few years ago, RC aircraft were powered by either anemic brushed motors or gas. Quadcopters were rare. Now, with brushless motors, flying has never been easier, building electric longboards is simple, and electric bicycles are common.
Of course, if you’re going to make anything fly with a brushless motor, you’ll probably want to know the efficiency of your motor and prop setup. That’s the idea behind [Michal]’s Automated RC Motor Efficiency Tester, his entry to the 2016 Hackaday Prize.
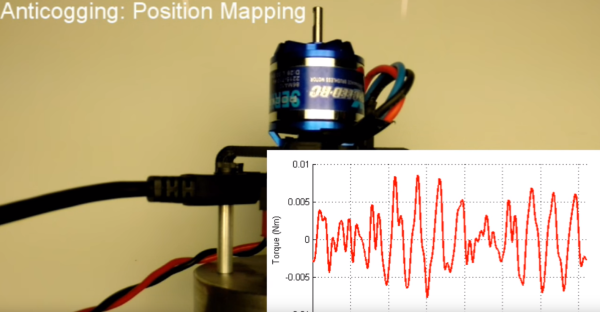
[Michal]’s project is not a dynamometer, the device you should use if you’re measuring the torque or power of a motor. That’s not really what you want if you’re testing brushless motors and prop configurations, anyway; similarly sized props can have very different thrust profiles. Instead of building a dyno for a brushless motor, [Michal] is simply testing the thrust of a motor and prop combination.
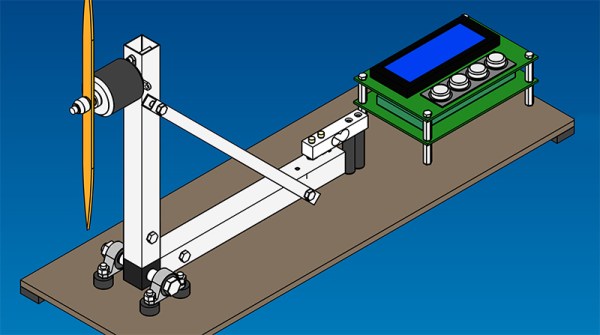
The device is very similar to a device sold at Hobby King, and includes a motor mount, microcontroller and display, and a force sensor to graph the thrust generated by a motor and prop. Data can be saved to an SD card, and the device can be connected to a computer for automatic generation of pretty graphs.
Brushless motors are finding a lot of uses in everything from RC planes and quadcopters, to robotics and personal transportation devices. You usually don’t get much of a data sheet with these motors, so any device that can test these motors will be very useful.





 A
A  The results are simply stunning. If the mathematics and construction of a polyhedron were not enough to make this project worth a second look, then the
The results are simply stunning. If the mathematics and construction of a polyhedron were not enough to make this project worth a second look, then the