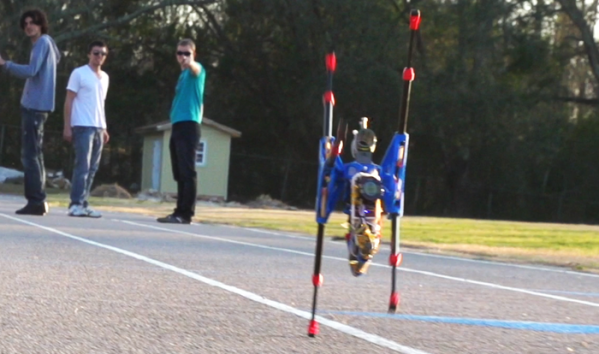
The computing power inside a quadcopter is enough to read a few gyros and accelerometers, do some math, and figure out how much power to send to the motors. What if a quadcopter had immensely more computing power, and enough peripherals to do something cool? That’s what Phenox has done with a micro quad that is able to run Linux.
Phenox looks like any other micro quad, but under the hood things get a lot more interesting. Instead of the usual microcontroller-based control system, the Phenox features a ZINQ-7000 System on Chip, featuring an ARM core with an FPGA and a little bit of DDR3 memory. This allows the quad to run Linux, made even more interesting by the addition of two cameras (one forward facing, one down facing), a microphone, an IMU, and a range sensor. Basically, if you want a robotic pet that can hover, you wouldn’t do bad by starting with a Phenox.
The folks behind Phenox are putting up a Kickstarter tomorrow. No word on how much a base Phenox will run you, but it’ll probably be a little bit more than the cheap quads you can pick up from the usual Chinese retailers.
Videos below.

 The SID chip inside the Commodore 64 and 128 is arguably still the gold standard for chip tunes, and the C64 itself still a decent computer for MIDI sequencing. [Frank Buss] realized most of the MIDI cartridges for the Commodore computers are either out of production or severely limited,
The SID chip inside the Commodore 64 and 128 is arguably still the gold standard for chip tunes, and the C64 itself still a decent computer for MIDI sequencing. [Frank Buss] realized most of the MIDI cartridges for the Commodore computers are either out of production or severely limited,