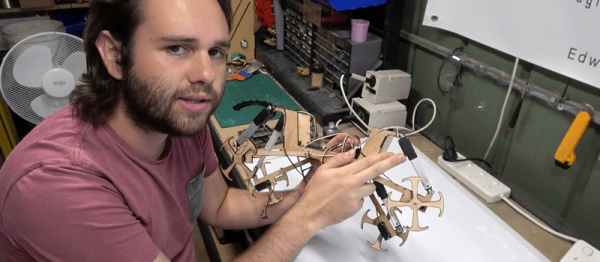
[Jaidyn Edwards] is building a robot. This isn’t going to be a normal robot, though, he’s building a whegged robot, inspired by Boston Dynamic’s version of the RHex design.
A wheg (TM) is a curved leg that rotates around a foxed fixed (Ed note: Fixed!) point on one end, driven by a motor. Hence the name: part wheel, part leg. By driving each leg separately, you can keep the robot balanced and push it forwards. This is a complex system to build. Unlike normal wheels or drive systems, you need to know exactly where the leg is to use it properly, as the position of the leg depends on the rotation of the motor.
The legs themselves are going to be 3D printed from a combination of rigid and flexible fabrics that should provide both strength and grip. In this first video, [Jaidyn] outlines his design, and explains why he is trying this approach. It’s the first in an ongoing series that should definitely be worth tuning into.
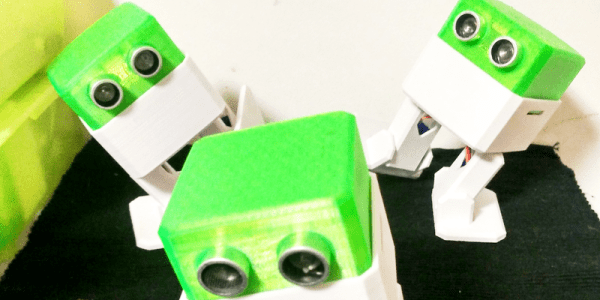
The Otto DIY robot has just taken first place in the coveted role as “best robot to 3D print for your (inner) child”. It’s cute, it dances, it doesn’t cost too much, it’s completely open source, and it’s not impossible to write code for. It’s probably the most refined Bob design that we’ve seen yet. Watch it move in the video below.
We humans walk funny. Pivoting one leg forward at the hip creates an offset that puts us off-balance sideways. We have to compensate for this with each step we take. Many robots handle this by instead taking small, calculated steps. Enter NABiRoS, the Non Anthropomorphic Bipedal Robot System (link to the video below). The ‘Non Anthropomorphic’ means that it doesn’t walk like a human, and yet the ‘Bipedal’ means it still walks on two legs. The difference is that it walks sideways.
Here’s how the folks from RoMeLa (Robotics & Mechanisms Laboratory) at UCLA did it. Imagine you rotated both your legs 90 degrees such that they were facing in opposite directions. Then you rotate your upper body 90 degrees to face one of your legs. You can now move your legs to walk in the direction you’re facing and there’ll be no more tilting sideways each time you take a step. The joints are also simpler as only a single degree of freedom is needed in each of the knee and hip joints. The ankles and feet are done with a compliant, or an elastic, joint much as you see with a lot of prosthetic legs. As you can see in the video below, in addition to walking, they can do some surprisingly active things such as hopping up and down and what we can only call skipping. In fact, the result is sometimes very human.
Anything can be a remote controlled airplane, and ‘copters – quad or not – simply beat the air into submission. Remote controlled cars are easy, and RC tanks can even shoot their guns. One type of vehicle has eluded remote control hobbyists to a large extent; building a remote control submarine is hard. Not only do you have buoyancy to worry about, but you also need a way to keep the dry parts dry, all while operating in an environment where radio doesn’t really work well.
[Ivan] has already built RC planes, but wanted to tackle a new challenge. He built an RC submarine, and he did it using the simplest household materials.
Nadya Peek is one of the hackers that should require no introduction for the regular Hackaday reader. She is a postdoc at the Center for Bits and Atoms at the MIT Media Lab. She’s responsible for Popfab, a CNC machine that fits in a suitcase and one of the first implementations of a Core XY stage we’ve seen. Nadya has joined the ranks of Rudolf Diesel, Nikola Tesla, Mikhail Kalashnikov, and George W.G. Ferris by having a very tiny piece of the Novena laptop bear her name. She’s built cardboard CNC machines, and taken the idea of simple, easy to build printers, routers, and drawbots worldwide. She just defended her thesis, the gist of which is, ‘How to rapidly prototype rapid prototyping machines.’ She’s also one of this year’s Hackaday Prize judges, for which we have the utmost appreciation.
This year, the organizers of the Fab 12 conference on digital fabrication in Shenzhen turned to Nadya and her team to bring their amazing experience to conference attendees. A workshop was in order, but Nadya didn’t have time to organize the logistics. The conference organizers made a deal: the Center for Bits and Atoms would teach a workshop, but getting all the materials and electronics was the responsibility of the organizers.
Upon arriving at the Shenzhen Sheridan, Nadya found the organizers didn’t hold up their end of the bargain. The cardboard, motors, electronics, and glue were nowhere to be found. A “rider” doesn’t quite translate from English, it seems. This is Shenzhen, though, where you can buy all the cardboard, motors, electronics, and iPhone clones you could imagine. What was the solution to this problem? Founding a company in Shenzhen for eight days.
Half a tourist’s guide to Shenzhen and half a deconstruction of what goes into cardboard CNC, Nadya’s talk for the 2016 Hackaday SuperConference covers what happens when you have a week to build a company that will build machines that build machines.
Imagine trying to make a ball-shaped robot that rolls in any direction but with a head that stays on. When I saw the BB-8 droid doing just that in the first Star Wars: The Force Awakens trailer, it was an interesting engineering challenge that I couldn’t resist. All the details for how I made it would fill a book, so here are the highlights: the problems I ran into, how I solved them and what I learned.
The HTC Vive’s Lighthouse localization system is one of the cleverest things we’ve seen in a while. It uses a synchronization flash followed by a swept beam to tell any device that can see the lights exactly where it is in space. Of course, the device has to understand the signals to figure it out.
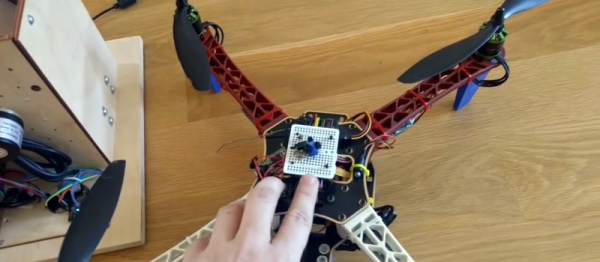
[Alex Shtuchkin] built a very well documented device that can use these signals to localize itself in your room. For now, the Lighthouse stations are still fairly expensive, but the per-device hardware requirements are quite reasonable. [Alex] has the costs down around ten dollars plus the cost of a microcontroller if your project doesn’t already include one. Indeed, his proof-of-concept is basically a breadboard, three photodiodes, op-amps, and some code.
His demo is awesome! Check it out in the video below. He uses it to teach a quadcopter to land itself back on a charging platform, and it’s able to get there with what looks like a few centimeters of play in any direction — more than good enough to land in the 3D-printed plastic landing thingy. That fixture has a rotating drum that swaps out the battery automatically, readying the drone for another flight.
If this is just the tip of the iceberg of upcoming Lighthouse hacks, we can’t wait!