[Andy_Fuentes22] likes to stream music, but is (understandably) underwhelmed by the sound that comes out of his phone. He wanted to build something that not only looks good, but sounds good. Something that could stream music through a Chromecast or a Raspi, but also take auxiliary input. Something awesome, like the Junkbots Sound System.
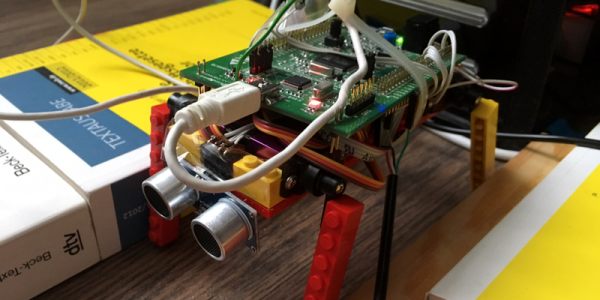
The ‘bots, named LR-E (Larry) and R8-CHL (Rachel), aren’t just cool pieces of art. They’re both dead-bug-walking bots with an LM386-based amplifier circuit and an AN6884-based VU meter in their transparent, industrial relay bodies. LR-E is the left channel, and his lovely wife is the right channel. The best part is that they are wired into the circuit through their 3.5mm plug legs and the corresponding jacks mounted in the Altoids tin base.
[Andy] built this labor of love from the ground up. He started with some very nice design sketches and took a bazillion pictures along the way. We think it sounds pretty good, but you can judge for yourself after the break. If VU meters are your jam, here’s another that’s built into the speaker.
Continue reading ““What Is My Purpose?” You Amplify And Display Signals.”