All across southern California there are tiny beetles eating their way into trees and burrowing into the wood. The holes made by these beetles are only about 1mm in diameter, making them nigh invisible on any tree with rough bark. Trees infested with these beetles will eventually die, making this one of the largest botanical catastrophes in the state.

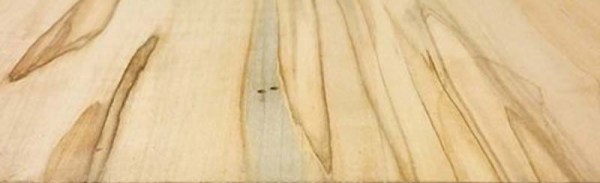
Although these ambrosia beetles will burrow into trees and kill them, there is another economic advantage to detecting these tiny, tiny beetles. The fungi deposited into these beetle bore holes make very pretty wood, but this wood is less valuable than lumber of the same species that isn’t infested with beetles. It’s a great project for the upcoming Citizen Science portion of the Hackaday Prize, as the best solution for detecting these beetles right now is sending a bunch of grade school students into the woods.








 If your project didn’t make the cut – or you haven’t started one yet – don’t worry. Until the end of May we’re running the second challenge for this year’s Hackaday Prize.
If your project didn’t make the cut – or you haven’t started one yet – don’t worry. Until the end of May we’re running the second challenge for this year’s Hackaday Prize. 








