When taking macro photographs, you often need just a tiny bit of controlled motion — so little that it’s tough to pull off by hand. To address this, [Salveo] designed a small open-source macro photography slider featuring an anti-backlash handle.
Macro photography gives you an extremely shallow field of view, sometimes under 1 mm of depth, in which subjects stay in focus. To combat this, it’s common to capture multiple images while sliding the camera forward or backward, then combine them for a much larger depth of field than a single shot provides. [Salveo]’s slider gives fine control over this focus-stacking process, with the knob even marked to show every 1 mm of linear travel.
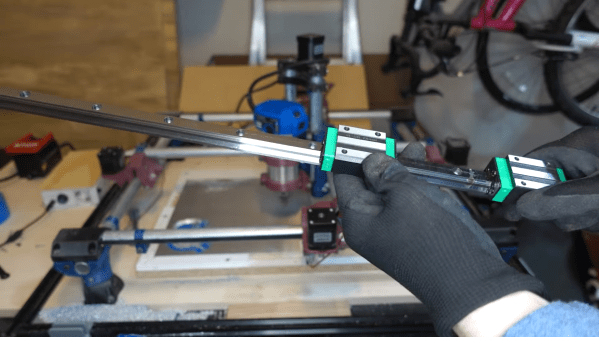
The slider is built around a 150 mm linear rail, though it could easily be lengthened or shortened to suit your needs. A T8 leadscrew, paired with anti-backlash nuts, translates the knob’s rotation into smooth linear motion. The knob itself uses a custom-designed anti-backlash mechanism to ensure the slider works cleanly in either direction.
You can grab all the 3D-printable files as well as the full bill of materials from the project page. Be sure to check out [Salveo]’s build video below. Thanks [Tim L.] for sending in this awesome open-source slider. Be sure to check out some of the other macro photography projects we’ve covered, too.
Continue reading “Tiny Moves, Big Depth: An Open-Source Macro Focus Slider”