Mathematics, as it is taught in schools, sometimes falls short in its mission to educate the pupils. This is the view of [Joan Horvath] and [Rich Cameron], particularly with respect to the teaching of calculus, which they feel has become a purely algebraic discipline that leaves many students in the cold when it comes to understanding the concepts behind it.
Their Hacker Calculus project aims to address this, by returning to [Isaac Newton]’s 1687 seminal work on the matter, Philosophiae Naturalis Principia Mathematica. They were struck by how much the Principia was a work of geometry rather than algebra, and they are seeking to return to [Newton]’s principles in a bid to make the subject more accessible to students left behind when it comes to derivatives and integrals. They intend to refine the geometric approach to create a series of practical items to explain the concepts, both through 3D printed items and through electronics.
We can see that this is an approach that has considerable merit, given that most Hackaday readers will have at some time or other sat through a maths lesson and come away wondering what on earth the teacher was talking about and having been baffled by further attempts to explain it through impenetrable maths-speak. If you were the kid who “got” calculus when the relationship between speed and acceleration – another thing we have [Newton] to thank for describing – was explained in your physics lessons, then you will probably understand.
The pair have some Hackaday Prize history, you may remember them from such previous entries as their 3D prints for the visually impaired project from last year.


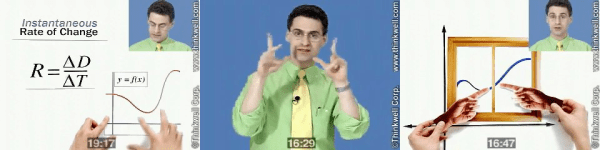



 running a calculus function on an Arduino presents a seemingly impossible scenario. In this article, we’re going to explore the idea of using derivative like techniques with a microcontroller. Let us be reminded that the derivative provides an instantaneous rate of change. Getting an instantaneous rate of change when the function is known is easy. However, when you’re working with a microcontroller and varying analog data without a known function, it’s not so easy. Our goal will be to get an average rate of change of the data. And since a microcontroller is many orders of magnitude faster than the rate of change of the incoming data, we can calculate the average rate of change over very small time intervals. Our work will be based on the fact that the average rate of change and instantaneous rate of change are the same over short time intervals.
running a calculus function on an Arduino presents a seemingly impossible scenario. In this article, we’re going to explore the idea of using derivative like techniques with a microcontroller. Let us be reminded that the derivative provides an instantaneous rate of change. Getting an instantaneous rate of change when the function is known is easy. However, when you’re working with a microcontroller and varying analog data without a known function, it’s not so easy. Our goal will be to get an average rate of change of the data. And since a microcontroller is many orders of magnitude faster than the rate of change of the incoming data, we can calculate the average rate of change over very small time intervals. Our work will be based on the fact that the average rate of change and instantaneous rate of change are the same over short time intervals.








