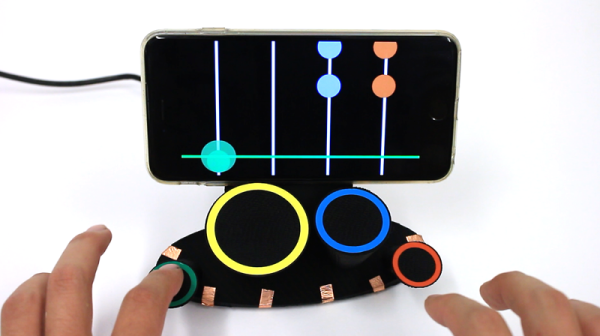
Touch screens are great, but big touchscreens are expensive and irregular touchscreens are not easy to make at all. Electrik is a method developed by several researchers at Carnegie Mellon University that makes almost any solid object into a touch surface using tomography. The catch is that a conductive coating — in the form of conductive sheets, 3D plastic, or paint — is necessary. You can see a demonstration and many unique applications in the video below. They’ve even made a touch-sensitive brain out of Jell-O and a touchable snowman out of Play-Doh.
The concept is simple. Multiple electrodes surround the surface. The system injects a current using a pair of electrodes and then senses the output at the other terminals. A finger touch will change the output of several of the electrodes. Upon detection, the system will change the injection electrodes and repeat the sensing. By using multiple electrode pairs and tomography techniques, the system can determine the location of touch and even do rough motion tracking like a low-resolution touch pad mouse.
Continue reading “Everything’s A Touch Surface With Electrick”