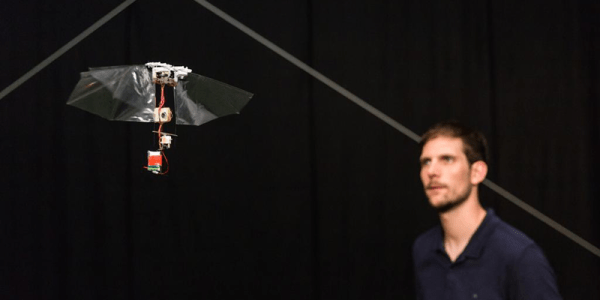
The DelFly project has been busy since the last time we checked in on them. The Dutch team started 13 years ago and produced the smallest camera-carrying drone, and an autonomous tiny ornithopter. However, that ornithopter — now five years old — had to use some traditional control surfaces and a tail like an airplane which was decidedly not fruit fly-like. Now they’ve solved those problems and have announced the DelFly Nimble, a 13 inch and 1-ounce ornithopter. You can see the Nimble in the video below.
The close emulation of a real fly means the thing looks distinctly insect-like in flight. The dual wings use Mylar and form an X configuration. They flap about 17 times per second. A fully charged battery — remember, the whole thing weighs an ounce — lasts five minutes. With an efficient speed of 3 meters per second, the team claims a flight range of over 1 kilometer with a peak speed that can reach 7 meters per second. It can even take a payload, as long as that payload weighs 4 grams or less.
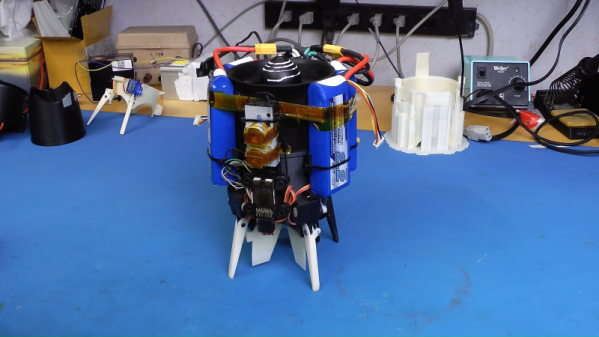
We’re not entirely sure what to call this one. It’s got the usual trappings of a drone, but with only a single rotor it clearly can’t be called by any of the standard multicopter names. Helicopter? Close, but not quite, since the rotor blades are fixed-pitch. We’ll just go with “monocopter” for now and sort out the details later for this ducted-fan, thrust-vectored UAV.
Whatever we choose to call it — builder [tesla500] dubbed it the simultaneously optimistic and fatalistic “Ikarus” — it’s really unique. The monocopter is built around a 90-mm electric ducted fan mounted vertically on a 3D-printed shroud. The shroud serves as a mounting point for the landing legs and for four servos that swivel vanes within the rotor wash. The vanes deflect the airstream and provide the thrust vectoring that gives this little machine its control.
Coming to the correct control method was not easy, though. Thanks mainly to the strong gyroscopic force exerted by the rotor, [tesla500] had a hard time getting the flight controller to cooperate. He built a gimballed test stand to work the problem through, and eventually rewrote LibrePilot to deal with the unique forces on the craft and tuned the PID loops accordingly. Check out the results in the video below.
Some attempts to reduce the number of rotors work better than others, of course, but this worked out great, and we’re looking forward to the promised improvements to come.
RCExplorer, or [David], or just ‘The Swede’, has come up with a bicopter kit. Yes, there are a lot of people making frames and kits for quadcopter, multicopters, drones, and so forth, but [David] is really the leader in weird multicopters. Now, we have the weirdest multicopter imaginable as a kit, complete with firmware that works.
[David] is one of the great unsung heroes of the drone and multicopter world. He’s famous for rocket knives, even though that really doesn’t have anything to do with drones, he bought an airplane for his front yard (again, little to do with drones), he was one of the first to take a glider up to 100,000 feet with a balloon, and he’s been one of the main forces behind tricopters as a superior — or at least cooler — platform for aerial acrobatics and camera work. There’s a lot of work being done to the various firmwares to support tricopters, and we have [David] to thank for that.
Like [David]’s earlier tricopter kits, this frame is made entirely out of carbon fiber plate, square tube, and threaded standoffs. It also looks like batman’s drone. The firmware — the real trick for a bicopter — is stock betaflight, and there are a few problems with the stock firmware. The bicopter doesn’t like flying backwards, tuning is fiddly, and it’s harder to fly than a quad on rails. That’s to be expected with a platform as weird as a bicopter, but this kit does open the door to firmware developers hacking and making the bicopter features better.
This is what delivery drones will look like, once the people who think delivery drones are a good idea learn physics.
While pure bicopters are great, the release of what will surely be a popular bicopter with a good community of firmware developers means the door is open to a simple VTOL fixed wing, not unlike a V-22 Osprey.
Remember, San Francisco tech bros, if you need a delivery drone, you need three things: long range, VTOL capability, and payload capacity. A quad or hexacopter will not get you there, and fixed wings will give you lift for free. There is no Moore’s Law for batteries, and right now if you want to ship a bottle of shampoo 20 miles in 30 minutes, the way to do that is with a drone that looks like a V-22 Osprey. Please, delivery drone bros, learn physics, use a tilt-rotor, and learn to put the battery in the wing. This is how you found a company that will get an easy $100M valuation.
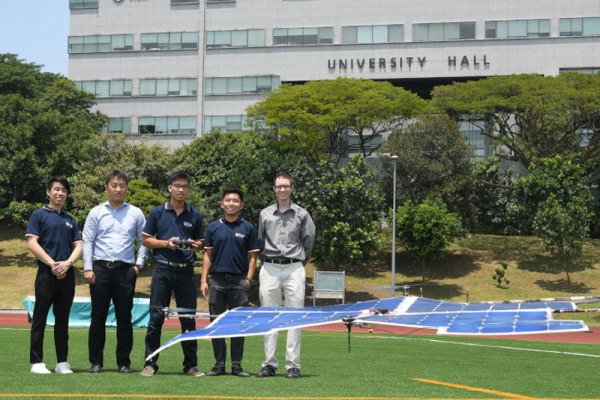
It seems kind of obvious when you think about it: why not just stick a solar panel on a quadcopter so it can fly on solar power? Unfortunately, physics is a cruel mistress, and it gets a bit more complex when you look at problems like weight to power ratios, panel efficiency, and similar tedious technical details. This group of National University of Singapore students has gone some way to overcome these technical issues, though: they just built a drone that is powered from solar power alone, with no batteries or other power source.
Their creation is a custom-built quadcopter made with carbon fiber that weighs just 2.6kg (about 5.7lbs), but which has about 4 square meters (about 43 square feet) of solar panels. By testing and hand-selecting the panels with the best efficiency, they were able to generate enough power to drive the four rotors, and have managed to achieve altitudes of up to 10 meters. The students have been working on prototypes of this since 2012, when their first version could only generate 45% of the power needed for flight. So, reaching 100% of flight power in the demo shown below is a significant step.
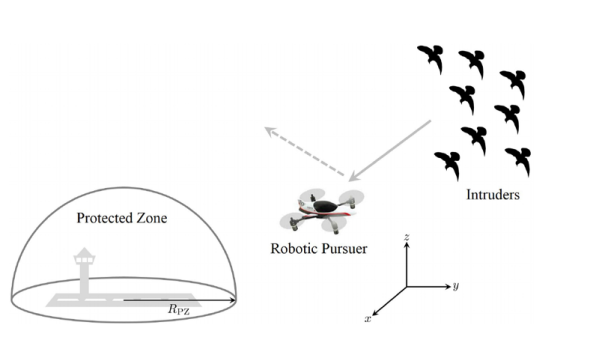
If you pay attention to airplane news — or you watched the film Sully — you know planes have problems with birds. Sully was about US Airways flight 1549 which struck a flock of geese and ditched in the Hudson river. Engineers at Caltech say that was the inspiration for them to develop a control algorithm that enables a single drone scarecrow to herd flocks of birds away from airports.
Airports have tried a lot of things to discourage birds ranging from trained falcons to manually-piloted drones. Apparently, herding birds is harder than you would think. If you fly the drone too far from a flock, it will ignore the threat. If you get too close, the flock will scatter making it both threaten a larger area and harder to control.
We don’t have to tell you that drones are all the rage. But while new commercial models are being released all the time, and new parts get released for the makers, the basic technology used in the hardware hasn’t changed in the last few years. Sure, we’ve added more sensors, increased computing power, and improved the efficiency, but the key developments come in the software: you only have to look at the latest models on the market, or the frequency of Git commits to Betaflight, Butterflight, Cleanflight, etc.
With this in mind, for a Hackaday prize entry [int-smart] is working on a quadcopter testbed for developing algorithms, specifically localization and mapping. The aim of the project is to eventually make it as easy as possible to get off the ground and start writing code, as well as to integrate mapping algorithms with Ardupilot through ROS.
The initial idea was to use a Beaglebone Blue and some cheap hobby hardware which is fairly standard for a drone of this size: 1250 kv motors and SimonK ESCs, mounted on an f450 flame wheel style frame. However, it looks like an off-the-shelf solution might be even simpler if it can be made to work with ROS. A Scanse Sweep LIDAR sensor provides point cloud data, which is then munched with some Iterative Closest Point (ICP) processing. If you like math then it’s definitely worth reading the project logs, as some of the algorithms are explained there.
Fair warning: [Paweł Spychalski]’s video is mostly him talking about how bad his “dualcopter” ended up. There are a few sequences of the ill-fated UAV undergoing flight tests, most of which seem to end with it doing a reasonable impression of a post-hole auger. We have to admit that it’s a pretty poor drone. But one can only truly fail if one fails to have some fun doing it, [Paweł] enjoyed considerable success, at least judging by the glee with which he repeatedly cratered the craft.
The overall idea seems to make sense, with coaxial props mounted in the middle of a circular 3D-printed frame. Mounted below the props are crossed vanes controlled by two servos. The vanes sit in the rotor wash and provide pitch and roll control, while yaw and thrust are controlled by varying the speeds of the counter-rotating props. [Paweł] knew going in that this was a sketchy aerodynamic design, and was surprised it performed as well as it did. But with ground effects limiting roll and pitch control close to the ground, the less-than-adequate thrust due to turbulence between the rotors, and the tendency for the center of mass and the center of gravity to get out whack with each other, all made for a joyously unstable and difficult to control aircraft.
Despite the poor performance, [Paweł] has plans for a Mark II dualrotor, a smaller craft with some changes based on what he learned. He’s no slouch at pushing the limits with multirotors, with 3D-printed racing quad frames and using LoRa for control beyond visual range. Still, we’re sure he’d appreciate constructive criticism in the comments, and we wish him luck with the next one.
 Whatever we choose to call it — builder [tesla500] dubbed it the simultaneously optimistic and fatalistic “Ikarus” — it’s really unique. The monocopter is built around a 90-mm electric ducted fan mounted vertically on a 3D-printed shroud. The shroud serves as a mounting point for the landing legs and for four servos that swivel vanes within the rotor wash. The vanes deflect the airstream and provide the thrust vectoring that gives this little machine its control.
Whatever we choose to call it — builder [tesla500] dubbed it the simultaneously optimistic and fatalistic “Ikarus” — it’s really unique. The monocopter is built around a 90-mm electric ducted fan mounted vertically on a 3D-printed shroud. The shroud serves as a mounting point for the landing legs and for four servos that swivel vanes within the rotor wash. The vanes deflect the airstream and provide the thrust vectoring that gives this little machine its control.