To some, an operating system is a burden or waste of resources, like those working on embedded systems and other low-power applications. To others it’s necessary, abstracting away hardware so that higher-level programming can be done. For most people it’s perhaps not thought of at all. But for a few, the operating system is the most interesting piece of software running on a computer and if you’d like to investigate what makes this often overlooked aspect of computer science interesting, take a look at this course on operating systems from Cornell University.
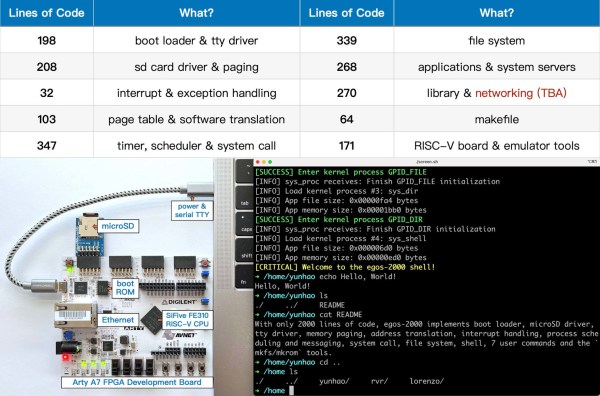
The operating system itself is called Earth and Grass Operating System because it splits the functionality of the operating system into three separate parts. The Earth layer involves dealing with hardware, the Grass layer involves hardware-independent aspects, and a third application layer implements other key operating system features. It’s built for a RISC-V processor, since that instruction set is completely open source and transparent about what it’s doing. It’s also incredibly small, coming in at around 2000 lines of code. The course covers nine areas, with the first six being core operating system functions and the remaining three covering more advanced operating system concepts.
For understanding the intricacies and sometimes mysterious ways that operating systems work, a course like this can go a long way into unraveling those mysteries and developing a deeper understanding of how it brings the hardware to work for higher-level software. We actually featured this operating system two years ago, before this course was created, which covers this project for those who like to take a more self-directed approach, or simply want a lightweight OS for a RISC-V system.