For some reason, we never tire of stories highlighting critical infrastructure that’s running outdated software, and all the better if it’s running on outdated hardware. So when we learned that part of the San Francisco transit system still runs on 5-1/4″ floppies, we sat up and took notice. The article is a bit stingy with the technical details, but the gist is that the Automatic Train Control System was installed in the Market Street subway station in 1998 and uses three floppy drives to load DOS and the associated custom software. If memory serves, MS-DOS as a standalone OS was pretty much done by about 1995 — Windows 95, right? — so the system was either obsolete before it was even installed, or the 1998 instance was an upgrade of an earlier system. Either way, the San Francisco Municipal Transportation Agency (SFMTA) says that the 1998 system due to be replaced originally had a 25-year lifespan, so they’re more or less on schedule. Replacement won’t be cheap, though; Hitachi Rail, the same outfit that builds systems that control things like the bullet train in Japan, is doing the job for the low, low price of $212 million.

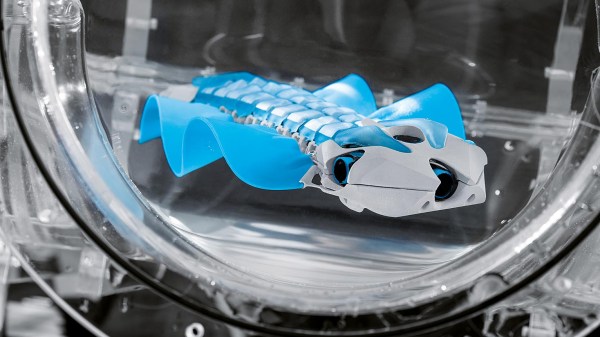
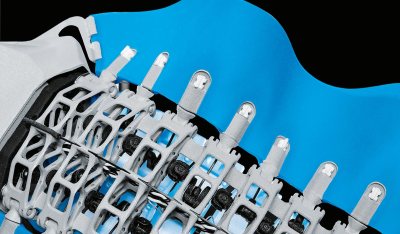 What was their elegant solution for making the fins undulate? Nine lever arms are attached to each fin. Those lever arms are controlled by two crankshafts which extend from the front of the body to the rear, one for each side. A servo motor then turns each crankshaft. Since the crankshafts are independent, that means each fin operates independently. This allows for turning by having one fin move faster than the other. A third motor in the head flexes the body, causing the robot to swim up or down.
What was their elegant solution for making the fins undulate? Nine lever arms are attached to each fin. Those lever arms are controlled by two crankshafts which extend from the front of the body to the rear, one for each side. A servo motor then turns each crankshaft. Since the crankshafts are independent, that means each fin operates independently. This allows for turning by having one fin move faster than the other. A third motor in the head flexes the body, causing the robot to swim up or down.