The Hackaday Prize is the greatest hardware competition on the planet. It’s the Academy Awards of Open Hardware, and over the last few years we’ve been doing it, we’ve seen literally tens of projects that have gone from an idea to a prototype to a finished project to a saleable product. It’s the greatest success story the Open Hardware community has.
Over the last eight months, we’ve been deep in the weeds with this year’s Hackaday Prize. It’s five challenges, with twenty winners per challenge. That’s one hundred projects that will make it to the semifinals in the hopes of becoming the greatest project this year. Only one will make it, but truthfully they all deserve it. These are the one hundred finalists in the Hackaday Prize, all truly awesome projects but only one will walk home with the Grand Prize. Continue reading “These Are The 100 Finalists In The Hackaday Prize”→
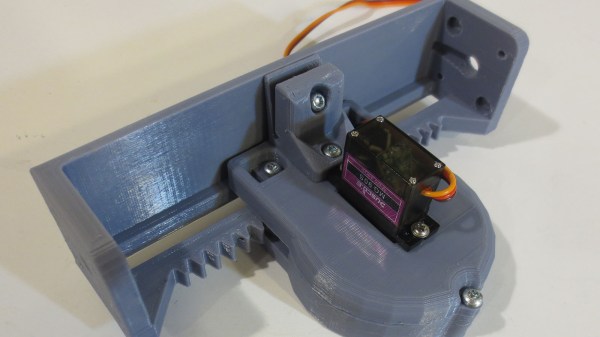
Our open source community invites anyone with an idea to build upon the works of those who came before. Many of us have encountered a need to control linear motion and adapted an inexpensive hobby servo for the task. [Michael Graham] evaluated existing designs and believed he has ideas to advance the state of the art. Our Hackaday Prize judges agreed, placing his 3D Printed Servo Linear Actuator as one of twenty winners of our Robotics Module Challenge.
[Michael]’s actuator follows in the footstep of other designs based on a rack-and-pinion gear such as this one featured on these pages, but he approached the design problem from the perspective of a mechanical engineer. The design incorporated several compliant features to be tolerant of variances between 3D printers (and slicer, and filament, etc.) Improving the odds of a successful print and therefore successful projects. Beginners learning to design for 3D printing (and even some veterans) would find his design tips document well worth the few minutes of reading time.
Another useful feature of his actuator design is the 20mm x 20mm screw mounting system. Visible on either end of the output slider, it allows mixing and matching from a set of accessories to be bolted on this actuator. He is already off and running down this path and is facing the challenge of having too many things to share while keeping them all organized and usable by everyone.
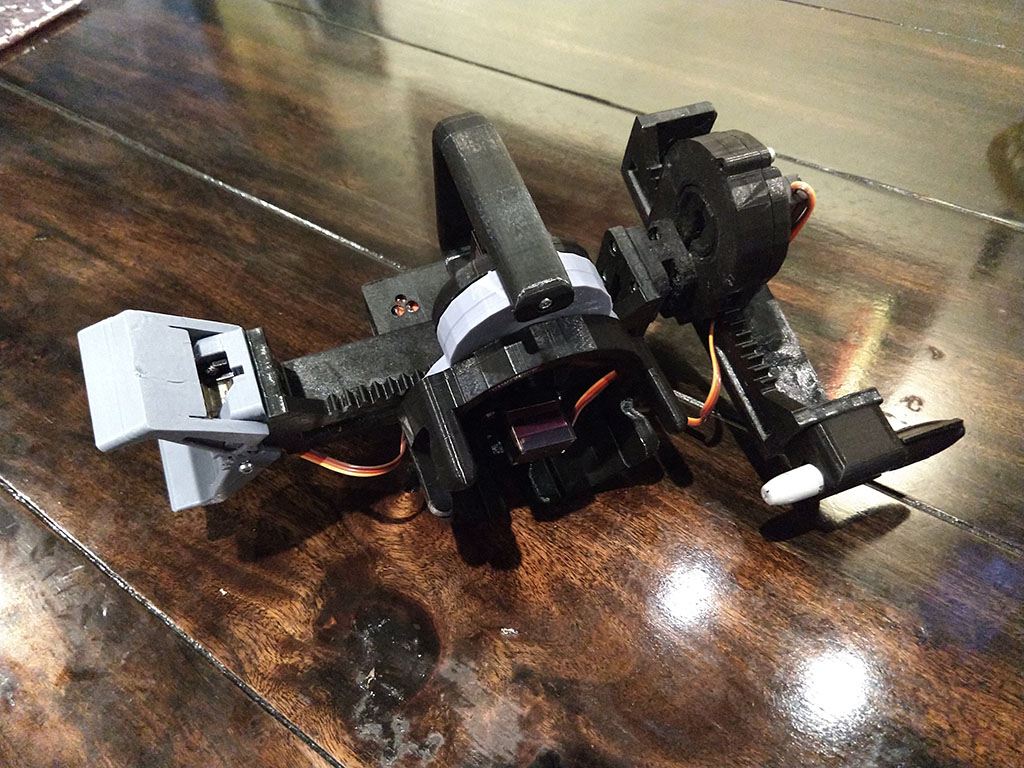
The flexible construction system allows him to realize different ideas within the modular system. He brought one item (a variant of his Mug-O-Matic) to the Hackaday + Tindie Meetup at Bay Area Maker Faire, and we’re sure there will be more. And given the thoughtful design and extensive documentation of his project, we expect to see his linear servos adopted by others and appear in other contexts as well.
This isn’t the only linear actuator we’ve come across. It isn’t even the only winning linear actuator of our Robotics Module Challenge, but the other one is focused on meeting different constraints like compactness. They are different tools for different needs – and all worthy additions to our toolbox of mechanical solutions.
Right now, we’re running the greatest hardware competition on the planet. The Hackaday Prize is the Academy Awards of Open Hardware, and we’re opening the gates to thousands of hardware hackers, makers, and artist to create the next big thing.
Last week, we wrapped up the second challenge in The Hackaday Prize, the Robotics Module challenge. Now we’re happy to announce twenty of those projects have been selected to move onto the final round and have been awarded a $1000 cash prize. Congratulations to the winners of the Robotics Module Challenge portion of the Hackaday Prize. Here are the winners, in no particular order:
It’s Friday, and that means this is your last weekend to get your project together for the Robotics Module Challenge in this year’s Hackaday Prize. We’re looking for tools for robots that blow the doors off what is commercially available. If you have a project in mind that adds sensors or capabilities to our fine electronic friends, enter it in the Hackaday Prize.
The Hackaday community has thrown itself full-force into the Hackaday Prize, and right now we’re getting very close to eight hundred projects entered in this year’s Prize. Next week, we’ll choose the top twenty projects entered during the Robotics Module Challenge to advance to the finals. Each of those twenty projects will be awarded $1,000 and be in the running to win the Grand Prize of $50,000 and four other top cash prizes.
This is your last chance to get in on the Robotics Module Challenge. For this Challenge, we’re looking for modules that can be used in robotics projects across the world. This could be a motor driver, sensor package, or even 3D printed tweels. Don’t wait — start your entry now.
While robots have been making our lives easier and our assembly lines more efficient for over half a century now, we haven’t quite cracked a Jetsons-like general purpose robot yet. Sure, Boston Dynamics and MIT have some humanoid robots that are fun to kick and knock over, but they’re far from building a world-ending Terminator automaton.
But not every robot needs to be human-shaped in order to be general purpose. Some of the more interesting designs being researched are modular robots. It’s an approach to robotics which uses smaller units that can combine into assemblies that accomplish a given task.
We’ve been immersing ourselves in topics like this one because right now the Robotics Module Challenge is the current focus of the Hackaday Prize. We’re looking for any modular designs that make it easier to build robots — motor drivers, sensor arrays, limb designs — your imagination is the limit. But self contained robot modules that themselves make up larger robots is a fascinating field that definitely fits in with this challenge. Join me for a look at where modular robots are now, and where we’d like to see them going.