Here is a two-part Navy training film from 1953 that describes the inner workings of mechanical fire control computers. It covers seven mechanisms: shafts, gears, cams, differentials, component solvers, integrators, and multipliers, and does so in the well-executed fashion typical of the era.
Fire control systems depend on many factors that occur simultaneously, not the least of which are own ship’s speed and course, distance to a target, bearing, the target’s speed and course if not stationary, initial shell velocity, and wind speed and direction.
The mechanisms are introduced with a rack and pinion demonstration in two dimensions. Principally speaking, a shaft carries a value based on revolutions. From this, a system can be geared at different ratios.
Cams take this idea further, transferring a regular motion such as rotation to an irregular motion. They do so using a working surface as input and a follower as output. We are shown how cams change rotary motion to linear motion. While the simplest example is limited to a single revolution, additional revolutions can be obtained by extending the working surface. This is usually done with a ball in a groove.
The film moves on to describe these mechanisms in the context of fire control systems. It does an excellent job of explaining how several different cams take the rotary input of a ship’s speed and deliver it as linear motion to the follower for output to other systems. Most are aptly named based on the type of output delivered; a reciprocal cam’s output is computed as the reciprocal of the input, and a square cam’s output is the square of the input.
 A tangent cam’s input is an angle between 40 and 70, and the output is the tangent of that angle. A time of flight cam takes the range as input and gives the time of flight for projectiles. Perhaps the most complicated, the barrel cam takes the advance range and advance elevation of the target and uses them to compute the superelevation of a projectile. It effectively contains an infinite number of cams that each compute a different superelevation. Differentials are explained quite well through a visual breakdown of the bevel gear variety. In these, the end gear pair provides endless racks to the spider gear’s pinion.
A tangent cam’s input is an angle between 40 and 70, and the output is the tangent of that angle. A time of flight cam takes the range as input and gives the time of flight for projectiles. Perhaps the most complicated, the barrel cam takes the advance range and advance elevation of the target and uses them to compute the superelevation of a projectile. It effectively contains an infinite number of cams that each compute a different superelevation. Differentials are explained quite well through a visual breakdown of the bevel gear variety. In these, the end gear pair provides endless racks to the spider gear’s pinion.
Part two opens with component solvers, which solve vector problems for firing upon stationary targets. These provide continuous solutions by forming vector diagrams based on own ship’s speed and bearing to the target at any given point. The solver calculates the speed vector relative to line of sight with a groove cam, and uses two slotted racks to compute the range rate along the line of sight and the bearing rate perpendicular to the line of sight.
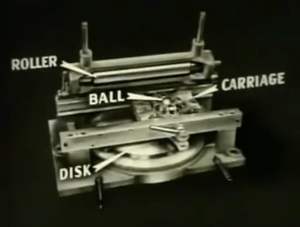 Disc-type integrators are used for range keeping where the present range equals the algebraic sum of the initial range and the range change. The disc integrator continuously computes the range change and outputs it to a differential, which along with the initial range computes the present range. It does this using a time disc and the range rate output sent from the component solver. The mechanism operates like a variable gear with infinite ratios.
Disc-type integrators are used for range keeping where the present range equals the algebraic sum of the initial range and the range change. The disc integrator continuously computes the range change and outputs it to a differential, which along with the initial range computes the present range. It does this using a time disc and the range rate output sent from the component solver. The mechanism operates like a variable gear with infinite ratios.
Finally, multipliers are used to multiply two continuously changing values, either or both of which may be positive or negative. This device is quite mesmerizing, if we may say so. The rack type described consists of two input racks at right angles to each other, an output rack, and a stationary pin that helps determine the zero point. Both input racks move along the scale and provide the product of the two inputs on the output rack.
Even though these systems were heavy, had a large footprint, and required a lot of power, there is much to be said for their elegance and reliability.
[Thank you to Barron for sending this in]
Retrotechtacular is a weekly column featuring hacks, technology, and kitsch from ages of yore. Help keep it fresh by sending in your ideas for future installments.














wtf, i saw this already
It’s new to someone.
If only there were some way to archive things so that content providers only had to post new things, and content consumers could always see the newest things, but other people could look at the old things they didn’t see yet, at their leisure…
We could call it a Baseless Load Of Gravy, or “blog” for short, and everyone can “hop on the Gravy train” to follow along.
Oh wait, those exist.
You could at least admit your mistakes (reposts, in this case) rather than acting like it was a purposeful choice. It’s the Cool Thing to do :-)
Yes, because it’s his mistake that a writer (who wasn’t even here when the first post mentioning this video) didn’t scour the years of content this blog has with a fine tooth comb.
I’m not saying it’s his fault that the duplicate post occurred.
I’m just saying that the appropriate thing to do is say “Oops! Yeah, sorry, we goofed up. Hopefully it will be new to some people at least.”
No, Matt is right. His assertion consists of two points. A mechanical fire control computer has been covered before on Hackaday, and our goal is to not repost. Both of these assertions are true. In fact, gannon’s assertion that it was not my mistake this was posted is incorrect, simply because I’m an editor and actually do the scheduling.
I’m going to give you a different argument. These are retrotechtaculars. All of these posts are reposts. I’m sure there’s some old geezer out there reading this that saw this film in its original format. If that’s you, you’re awesome, and we should talk.
The point is, this is a repost of something that is naturally a repost. Hell, the film itself is 50 years old. It’s evergreen content, and as long as we don’t repost this stuff too often (keeping in mind that Kristina’s content is new, and not a copy of older hackaday posts), I don’t see much wrong with it.
Now, I’m not an ideologue when it comes to the editorial policy of hackaday. Given this and the reaction to this post, I can update the policies. While I don’t have a problem with this post, I will be looking at posts in the future with a closer eye; something that was a repost 10 years ago is probably worthy of a repost. Something two years ago? Eh, probably not.
Unless you’re a paid subscriber to HAD (and no one is, so uh…), where do you get off thinking that Brian owes you an apology? Sure, they try not to repost things, but stuff happens. Sheesh.
Note: Brian’s follow-up reply to your unsolicited whine is much kinder than mine. Bravo, Brian.
Brian’s follow-up is fantastic. That is exactly how you foster relationships with your customers. Kudos for that.
And Rob, whether you think so or not, if I browse this website a dozen times a day, that makes me a customer.
FTR, I don’t have a problem with the repost. I have a rather low Slashdot UID, so reposts are nothing new to me. It’s all about how they’re handled, and it’s clear to me now that the HAD is indeed listening and that they give a damn. In the end that’s all that really matters.
Fuel for the fire – this was new to me. So thank you.
I watched it all both times. Still awesome.
Glad I’m not going crazy.
Quickly, someone buy [Milo] a cookie and him a key to the city! This calls for celebration!
So have I, but I decide that is some of life’s small shit not worthy of sweating. Practically every thing that prompt complaints at Hackaday fall into that category. IMNSHO (I My Not So Humble Opinion)
Repeat
http://hackaday.com/2013/03/13/retrotechtacular-mechanical-targeting-computers/
Now let’s wait until someone restores one and gets it on the retro hackaday website… (don’t panic, I’m joking!)
The Geek Group is already working on restoring one. We just got it and the restoration is well underway. Here’s the start of it. https://www.youtube.com/watch?v=hXNcDncuDFI
unfortunately, as i understand it, it will never be completely restored, but the parts will be used in demoing the individual sub-ensembles…
correct me if i am wrong.
That is correct. It will be operationally restored as much as it can be. However it relies on support systems that are not part of this box. We have the main CPU, but various I/O bits are separate assemblies in other parts of the ship. Once restored, ours will be functional and will actually operate to solve computations though. Long before that, we have several thousand little rusted bearings to replace.
good luck, captain.
Well there’sn ot much else really to do with it unless you have a battleship handy and some enemies you need to blow up. I don’t use my Quest Super Elf for much but it looks good hanging on the wall and I can take it down and show you that it works.
Gee Chris you could have told where to fast forward in the video. In manual labor circles there is a term to describe the scene of loading up the best. Clean version;”looks like bunch of monkeys trying to screw a football”. Good lick with the restoration.
@ localroger are you saying hackers can’t find a way to put this to work? The first thing first thought I had was would. be perfect fit with Pete’s gun turret ham antenna mount central Kansas.
While the entire antenna farm is worth look, this should start near where the turret i the subject, if don’t sue me ;)
http://youtu.be/leh3HQhoScw?t=4m
Wow, bouncing 500Watts off the moon with a gun turret and what looks like a recycled sat uplink dish… that deserves a feature all of its own.
Fascinating stuff!
Kristina, your writeup was very well done. This is one of my favorite retrotechtacular videos. Please keep up the good work.
During an overnight stay on the USS Missouri, I got a chance to see its fire control computer. What innards I could see through access panels were a thing of beauty, more intricate than a Difference Engine. I was still using film, and was out of shots by that portion of the tour.
the sad thing is, while I have access to some of this hardware, it would be absolutely illegal for me to watch this video and restore the Fire Director aboard the LCS-102 museum ship :( Almost as verboten as demil-ing the main gun.
But we could add this video to the presentations that autorun in various parts of the ship..
Simple, restore it and leave one small part out so it does not function.
Frankly I can see why fixing the main gun would be an issue but the Fire Director?
Ahh. Reminds me of my UFT days working on the old Mk 113 Mod 9 fire control system. Servos, Synchros, Selsns, travelling nuts, winding varieties… the smell of working on that stuff will remain forever in my nostrils.
The important point is not just the analog mechanical instrumentation. It is the ballistic problem itself that was formerly solved mechanically that remains the same.. One must understand that before delving into modern microprocessor digital software that ultimately must drive servos that aim the guns. Before one can design software, a complete mathematic understanding of how an analog mechanical system works. I have worked in a software development lab that verified airborne systems. Software people must first understand an analog analysis to realize what they must deal with. They must learn by first being aware of the 3 D geometry involved. This is part of good systems engineering that is often lacking.