It doesn’t matter how you pronounce it, because whichever way you choose to say “GIF” is guaranteed to cheese off about half the people listening. Such is the state of our polarized world, we suppose, but there’s one thing we all can agree on — that a mechanical GIF is a pretty cool thing.
What’s even better about this thing is that [Mitch], aka [Hack Modular], put some very interesting old aircraft hardware to use to make it. He came upon a set of cockpit indicators from a Cold War-era RAF airplane — sorry, “aeroplane” — that used a magnetically driven rack and pinion to swivel a set of prism-shaped pieces to one of three positions. Which of the three symbols displayed depended on which faces were turned toward the pilot; they were highly visible displays that were also satisfyingly clicky.
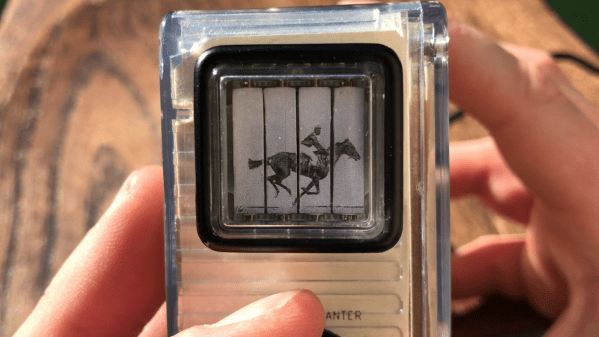
After a teardown in which [Mitch] briefly discusses the mechanism behind these displays, he set about customizing the graphics. Rather than the boring RAF defaults, he chose three frames from the famous Horse in Motion proto-motion picture by [Eadweard Muybridge]. After attaching vertical strips from each frame to the three sides of each prism, [Mitch] came up with a driver for the display; he could have used a 555, but more fittingly chose series-connected relays to do the job. Capacitors slow down the switching cascade and the frame rate; a rotary switch selects different caps to make the horse appear to be walking, trotting, cantering, or galloping — yes, we know they’re each physically distinct motions, but work with us here.
The whole thing looks — and sounds — great mounted in a nice plastic enclosure. The video below shows it in action, and we find it pretty amazing the amount of information that can be conveyed with just three frames. And we’re surprised we’ve never seen these displays before; they seem like something [Fran Blanche] or [Curious Marc] would love.
Continue reading “Mechanical GIF Animates With The Power Of Magnets”