For all their joking about “reinventing the wheel”, the team behind Ourobot made a very cool robot (German, automatic translation here). The team, at the University of Applied Sciences in “Bielefeld, Germany“, built their wheel out of twelve segments, each with its own servo motor, a 3D-printed case, and a pressure sensor mounted on the outside of the wheel. The latter, plus some clever programming, allows the robot wheel to vary its circular gate and climb up over obstacles automatically.
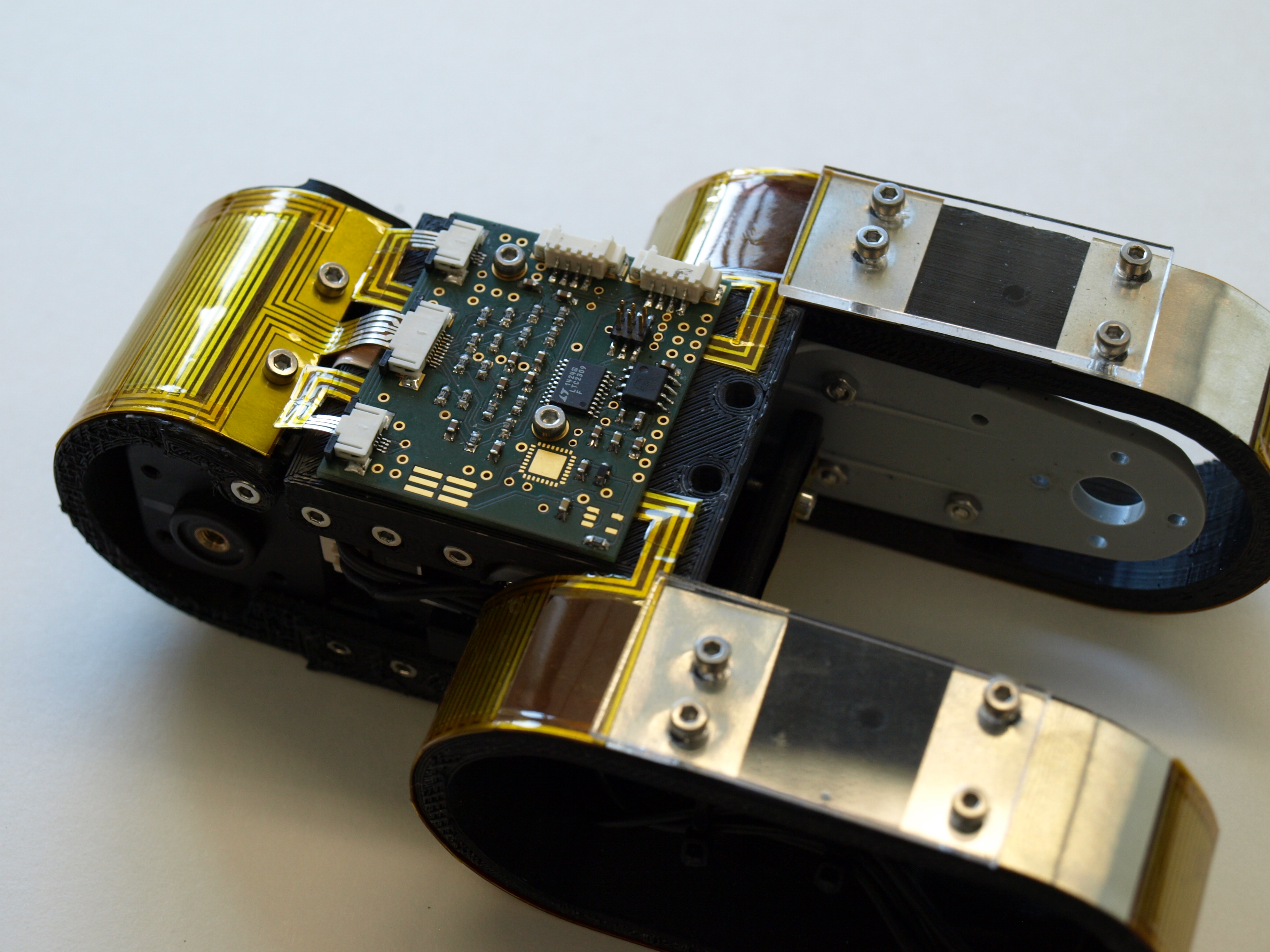
There are a bunch of interesting constraints in designing the control for this bot. The tracks on the ground, naturally, have to adjust their relative angles so that they lie each flat on the surface, even if that surface isn’t itself flat or level. The segments in the air are unconstrained, but the sum of all the servos’ interior angles has to add up to 1800 degrees, and these angles control where its center of gravity is.
Our head is spinning. The paper, “OUROBOT – A Self-Propelled Continuous-Track-Robot for Rugged Terrain” is unfortunately behind the IEEE paywall, but goes into detail if you can find it. Continue reading “Ourobot: What Happens When A Snake Bot Swallows Its Own Tail”