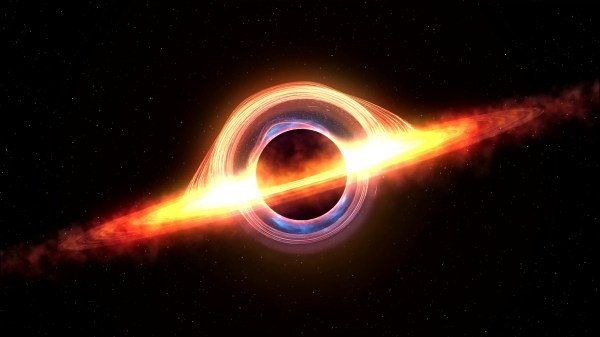
OK, that was a little click-baity, but then again, so was the announcement this week that a scientist had confirmed Hawking radiation with a lab-grown black hole. It sure got our attention, at least.
As it turns out, the truth is both less and more than meets the eye. The article above was eventually edited to better reflect the truth that, alas, we have not yet found a way to create objects so massive that even light cannot escape them. Instead, physicist [Jeff Steinhauer] and colleagues at the Technion-Israel Institute of Technology have developed an acoustic model of black holes, which is what was used to observe the equivalent of Hawking radiation for the first time. Hawking radiation is the theoretical exception to the rule that nothing makes it out of a black hole and would imply that black holes evaporate over time. The predicted radiation would be orders of magnitude weaker than the background radiation, though, making it all but impossible to detect.
That’s where [Steinhauer]’s sonic black holes come in. In these experiments, phonons, packets of mechanical vibrations that stand in for photons, are trapped in a fast-moving stream of fluid. The point in the stream where its speed straddles the local speed of sound is the equivalent to a real black hole’s event horizon; phonons inside that boundary can never escape. Except, of course, for the sonic equivalent of Hawking radiation, which the researchers found after 97,000 attempts.
When we first stumbled upon this story, we assumed a lab-grown black hole, even an acoustic analog, would take a CERN’s-worth of equipment to create. It turns out to be far simpler than that; [Steinhauer], in fact, built his black hole machine singlehandedly from relatively simple equipment. The experiments do require temperatures near absolute zero and a couple of powerful lasers, so it’s not exactly easy stuff; still, we can’t help but wonder if sonic black holes are within the reach of the DIY community. Paging [Ben Krasnow] and [Sam Zeloof], among others.
[Featured image credit: Nitzan Zohar, Office of the Spokesperson, Technion]