In order to understand something, it helps to observe it up close and study its inner workings. This is no less true for the brain, whether it is the brain of a mouse, that of a whale, or the squishy brain inside our own skulls. It defines after all us as a person; containing our personality and all our desires and dreams. There are also many injuries, disorders and illnesses that affect the brain, many of which we understand as poorly as the basics of how memories are stored and thoughts are formed. Much of this is due to how complicated the brain is to study in a controlled fashion.
Recently a breakthrough was made in the form of a detailed map of the cells and synapses in a segment of a human brain sample. This collaboration between Harvard and Google resulted in the most detailed look at human brain tissue so far, contained in a mere 1.4 petabytes of data. Far from a full brain map, this particular effort involved only a cubic millimeter of the human temporal cortex, containing 57,000 cells, 230 millimeters of blood vessels and 150 million synapses.
Ultimately the goal is to create a full map of a human brain like this, with each synapse and other structures detailed. If we can pull it off, the implications could be mind-bending.
To those who have kept tabs on nuclear fusion research the past decades beyond the articles and soundbites in news outlets, it’s probably clear just how much progress has been made, and how many challenges still remain. Yet since not that many people are into plasma physics, every measure of progress, such as most recently by the South Korean KSTAR (Korea Superconducting Tokamak Advanced Research) tokamak, is met generally by dismissive statements about nuclear fusion always being a certain number of decades away. Looking beyond this in coverage such as the article by Science Alert about this achievement by KSTAR we can however see quite a few of these remaining challenges being touched upon.
Recently KSTAR managed to generate 100 million degrees C plasma and maintain this for 48 seconds, a significant boost over its previous record from 2021 of 30 seconds, partially due to the new divertors that were installed. These divertors are essential for removing impurities from the plasma, yet much like the inner wall of the reactor vessel, these plasma-facing materials (PFM) bear the brunt of the super-hot plasma and any plasma instabilities, as well as the constant neutron flux from the fusion products. KSTAR now features tungsten divertors, which has become a popular material choice for this component.
Researching the optimal PFMs, as well as plasma containment modes and methods to suppress plasma instabilities are just some of the challenges that form the road still ahead before commercial fusion can commence.
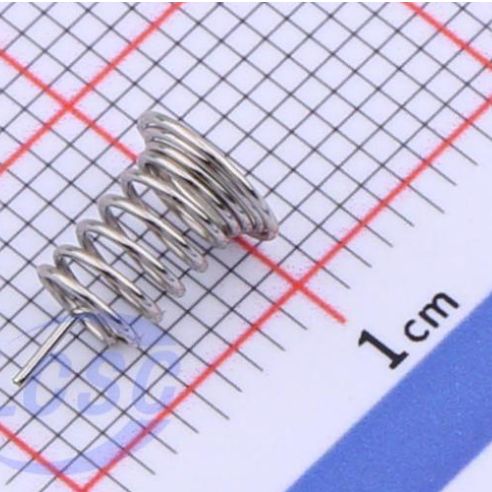
When [Daniel Eichhorn] designed the Pendrive S3 project, he wanted to use an off-the-shelf USB enclosure but also add a button for the user to start certain actions. Drilling a hole into the enclosure would be an option, but decided a touch sensor on the top of the enclosure would be much more elegant — not to mention better at keeping dirt and moisture out. To bridge the 6.3 mm spacing between the PCB and the top of the enclosure [Daniel] used a small, 7 mm PCB-mounted spring.
The spring used to create a capacitive touch sensor. (Source: JLCPCB parts)
Although capacitive sensing works with just about anything that’s electrically conductive, it’s important to get the conductive element as close to the user’s digits as possible. Using a spring here has the advantage that when the enclosure is closed up, the lid will push down onto the spring, which will not only compress slightly, but also provide the best capacitive sensing experience when e.g. the enclosure flexes or warps over time on account of always being pressed against the inside of the lid.
While hardly world-changing, this is another neat design tip when you’re looking to turn more surfaces into touch controls. Just keep in mind that capacitive sensing is notoriously fussy and any trace and spring are also excellent antennae for stray EMI. Nobody likes random capacitive button inputs, after all.
Over the past few years a number of teams have been putting a lot of effort into taking beloved Nintendo 64 games, decompiling them, and lovingly crafting them into highly portable C code. This allows for these games to not only run natively on PCs, but also for improvements to be made to the rendering engine and other components.
Yet this artisan approach to porting these games means a massive time investment, something which static binary translation (static recompilation) may conceivably speed up. Enter the N64: Recompiled project, which provides a binary translation tool to ease the translation of the N64’s binaries into C code.
This is effectively quite similar to what an emulator does in real-time, just with the goal of creating a permanent copy of the translated instructions. After this static binary translation, the C code can be compiled again, but as noted by the project’s documentation, a suitable runtime is needed to get a functional game. An example of this is the Zelda 64: Recompiled project, which uses the N64: Recompiled project at its core, while providing the necessary scaffolding and wrappers to create a working copy of The Legend of Zelda: Majora’s Mask as output.
In the video below, [Modern Vintage Gamer] takes the software for a test drive and comes away very excited about the potential it has to completely change the state of N64 emulation. To be clear, this isn’t a one-button-press solution — it still requires capable developers to roll up their sleeves and get the plumbing in. It’s going to take some time before you favorite game is supported, but the idea of breathing new life into some of the best games from the 1990s and early 2000s certainly has us eager to see where this technology goes
Back in the innocent days of the late 1980s the Internet as we know it today did not exist yet, but there were still plenty of FTP servers. Since manually keeping track of all of the files on those FTP server would be a royal pain, [Alan Emtage] set to work in 1986 to create an indexing and search service called Archie to streamline this process. As a local tool, it’d regularly fetch the file listing from FTP servers in a list, making this available for easy local search.
After its initial release in 1990, its feature set was expanded to include a World Wide Web crawler by version 3.5 in 1995. Years later, it was assumed that the source for Archie had been lost. That was until the folk over at [The Serial Port] channel managed to track down a still running Archie server in Poland.
The name Archie comes from the word ‘archive’ with the ‘v’ stripped, with no relation to the Archie comics. Even so, this assumption inspired the Gopher search engines Jughead and Veronica. Of these the former is still around, and Veronica’s original database was lost, but a re-implementation of it is still around. Archie itself enjoyed a period of relative commercial success, with [Alan] starting Bunyip Information Systems in 1992 which lasted until 2003. To experience Archie today, [The Serial Port] has the Archie documentation online, along with a live server if you’re feeling like reclaiming the early Internet.
Although we usually imagine the conditions in Ancient Egypt to be much like the Egypt of today, back during the Holocene there was significantly more rain as a result of the African Humid Period (AHP). This translated in the river Nile stretching far beyond its current range, with many more branches. This knowledge led a team of researchers to test the hypothesis that the largest cluster of pyramids in the Nile Valley was sited along one of these now long since vanished branches. Their findings are described in an article published in Communications Earth & Environment, by [Eman Ghoneim] and colleagues.
The Ahramat Branch and pyramids along its trajectory. (Credit: Eman Ghoneim et al., 2024)
The CliffsNotes version can be found in the accompanying press release by the University of North Carolina Wilmington. Effectively, the researchers postulated that a branch of the Nile existed along these grouping of pyramids, with their accompanying temples originally positioned alongside this branch. The trick was to prove that a river branch once existed in that area many thousands of years ago.
What complicates this is that the main course of the Nile has shifted over the centuries, and anthropogenic activity has obscured much what remained, making life for researchers exceedingly difficult. Ultimately a combination of soil core samples, geophysical evidence, and remote sensing (e.g. satellite imagery) helped to cement the evidence for the existence what they termed the Ahramat Nile Branch, with ‘ahramat’ meaning ‘pyramids’ in Arabic.
Synthetic Aperture Radar (SAR) and high-resolution radar elevation data provided evidence for the Nile once having traveled right past this string of pyramids, also identifying the modern Bahr el-Libeini canal as one of the last remnants of the Ahramat Branch before the river’s course across the floodplain shifted towards the East, probably due to tectonic activity. Further research using Ground Penetrating Radar (GPR) and Electromagnetic Tomography (EMT) along a 1.2 km section of the suspected former riverbed gave clear indications of a well-preserved river channel, with the expected silt and sediments.
Soil cores to a depth of 20 and 13 meters further confirmed this, showing not only the sediment, but also freshwater mussel shells at 6 meter depth. Shallow groundwater was indicated at these core sites, meaning that even today subsurface water still flows through this part of the floodplain.
These findings not only align with the string of pyramids and their causeways that would have provided direct access to the water’s edge, but also provided hints for a further discovery regarding the Bent Pyramid — as it’s commonly known — which is located deep inside the desert today. Although located far from the floodplain by about a kilometer, its approximately 700 meters long causeway terminates at what would have been a now extinct channel: the Dahshur Inlet, which might also have served the Red Pyramid and others, although evidence for this is shakier.
Altogether, these findings further illustrate an Ancient Egypt where the Old Kingdom was followed by a period of severe changes, with increasing drought caused by the end of the AHP, an eastwardly migrating floodplain and decreased flow in the Nile from its tributaries. By the time that European explorers laid eyes on the ancient wonders of the Ancient Egyptian pyramids, the civilization that had birthed them was no more, nor was the green and relatively lush environment that had once surrounded it.
A recent change was announced to the NetBSD commit guidelines which amends these to state that code which was generated by Large Language Models (LLMs) or similar technologies, such as ChatGPT, Microsoft’s Copilot or Meta’s Code Llama is presumed to be tainted code. This amendment was to the existing section about tainted code, which originally referred to any code that was not written directly by the person committing the code, and was due to licensing concerns. The obvious reason behind this is that otherwise code may be copied into the NetBSD codebase which may have been licensed under an incompatible (or proprietary) license.
In the case of LLM-based code generators like the above-mentioned, the problem stems from the fact that they are trained on millions of lines of code from all over the internet, which are naturally released under a wide variety of licenses. Invariably, some of that code will be covered by a license that’s not acceptable for the NetBSD codebase. Although the guideline mentions that these auto-generated code commits may still be admissible, they require written permission from core developers, and presumably an in-depth audit of the code’s heritage. This should leave non-trivial commits that got churned out by ChatGPT and kin out in the cold.