When looking for electronics projects to use in educational settings, there is no shortage of simple, lightweight, and easily-accessible systems to choose from. From robotic arms, drones, walking robots, and wheeled robots, there is a vast array of options. But as technology marches on, the robotics platforms need to keep up as well. This turtle-style wheeled robot called the Trundlebot uses the latest in affordable microcontrollers on a relatively simple, expandable platform for the most up-to-date educational experience.
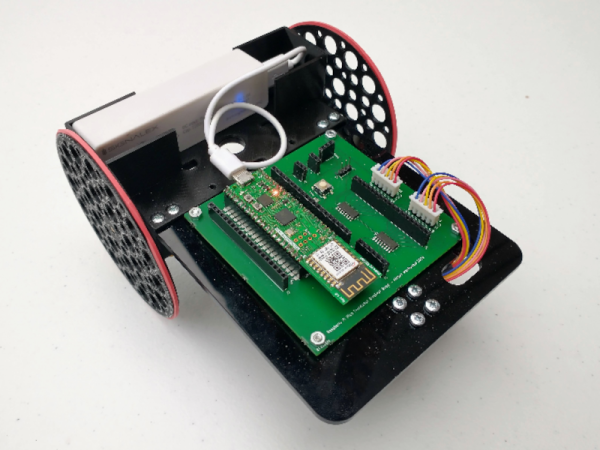
The robot is built around a Raspberry Pi Pico, with two low-cost stepper motors to drive the wheeled platform. The chassis can be built out of any material that can be cut in a laser cutter, but for anyone without this sort of tool it is also fairly easy to cut the shapes out by hand. The robot’s functionality can be controlled through Python code, and it is compatible with the WizFi360-EVB-Pico which allows it to be remote controlled through a web application. The web interface allows easy programming of commands for the Trundlebot, including a drag-and-drop feature for controlling the robot.
With all of these features, wireless connectivity, and a modern microcontroller at the core, it is an excellent platform for educational robotics. From here it wouldn’t be too hard to develop line-follower robots, obstacle-avoiding robots, or maze-solving robots. Other components can easily be installed to facilitate these designs as well. If you’re looking for a different style robot, although not expressly for educational purposes this robotic arm can be produced for under $60.