Some people are very picky about their pens. Entire forums exist to discuss the topic of pen superiority. However, it comes down to a personal choice. Some people like gel while others prefer ballpoint.
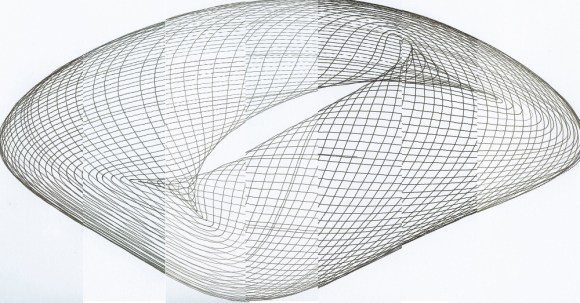
[Jens] built a drawing robot that produces drawings like the one seen here. It uses several linkages connected to two stepper motors, which give fine control over the pen. With the robot working [Jens] set out to find the best pen for robotic drawing.
Seven pens were tested on the machine, each drawing the same pattern. [Jens] found that gel and rollerball pens work the best on the robot, and started examining the performance of each.
The pens all performed differently, but two winners were chosen to use in the machine. The Pentel Energel Deluxe RTX and the Pilot G-2 07 beat out the competition since they maintained good lines at high speeds.
If you’re looking to build a drawing robot, [Jens]’ research should help you pick the best pen for your application. For inspiration, a video of the robot in action is waiting after the break.

 When you think of a robotic arm, you’re probably thinking about digital control, microcontrollers, motor drivers, and possibly a feedback loop. Anyone who was lucky enough to have an Armatron knows this isn’t the case, but you’d still be surprised
When you think of a robotic arm, you’re probably thinking about digital control, microcontrollers, motor drivers, and possibly a feedback loop. Anyone who was lucky enough to have an Armatron knows this isn’t the case, but you’d still be surprised 









