By now you’d think we’ve seen just about every means of robotic actuator possible. We have Cartesian bots, Stewart platforms, SCARA bots, Delta bots, and even some exceedingly bizarre linkages from [Nicholas Seward]. We’re not done with odd robotic arms, it seems, and now we have Delta-ish robots that can move outside their minimum enclosed volume. They’re fresh from the workshop of [Aad van der Geest], and he’s calling them double and triple Deltas.
By now you’d think we’ve seen just about every means of robotic actuator possible. We have Cartesian bots, Stewart platforms, SCARA bots, Delta bots, and even some exceedingly bizarre linkages from [Nicholas Seward]. We’re not done with odd robotic arms, it seems, and now we have Delta-ish robots that can move outside their minimum enclosed volume. They’re fresh from the workshop of [Aad van der Geest], and he’s calling them double and triple Deltas.
Previous Delta robots have used three universal joints to move the end effector up and down, and side to side. They’re extremely fast and are a great design for 3D printers and pick and place machines, but they do have a limitation: the tip of a single Delta can not move much further than the base of the robot.
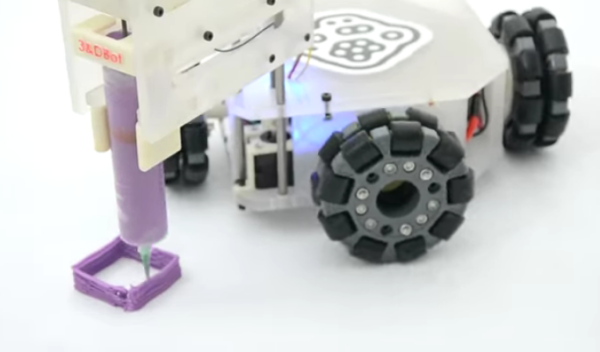
By adding more parallelograms to a Delta, [Aad] greatly increases working volume of a his robots. One of the suggested uses for this style of bot is for palletizers, demonstrated in the video below by stacking Jenga blocks. There is another very interesting application: legs. There’s footage of a small, simple triple Delta scooting around the floor, supported by wire training wheels below. It makes a good cat toy, but we’d love to see a bipedal robot with this style of legs.
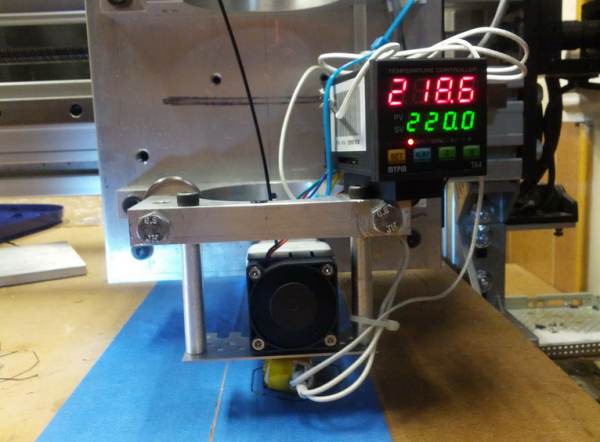
 [Jon] used liked Mach3 for controlling his CNC Router so he stuck with it for printing. He’s tried a few slicers but it seems Slic3r works the best for his setup. Once the g-code is generated it is run though Mach3 to control the machine. [Jon] admits that he has a way to go with tweaking the settings and that the print speed is slower than most print-only machines due to the mass of the frame’s gantry and carriage. Even so, his huge whistle print looks pretty darn good. Check it out in the video after the break…
[Jon] used liked Mach3 for controlling his CNC Router so he stuck with it for printing. He’s tried a few slicers but it seems Slic3r works the best for his setup. Once the g-code is generated it is run though Mach3 to control the machine. [Jon] admits that he has a way to go with tweaking the settings and that the print speed is slower than most print-only machines due to the mass of the frame’s gantry and carriage. Even so, his huge whistle print looks pretty darn good. Check it out in the video after the break…