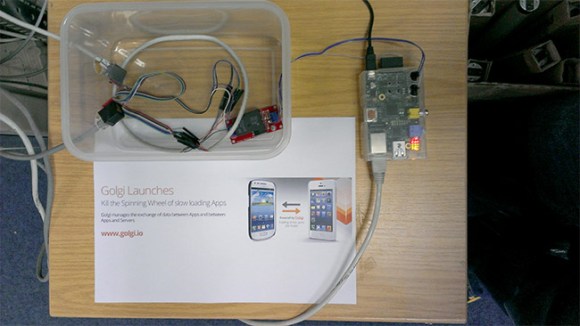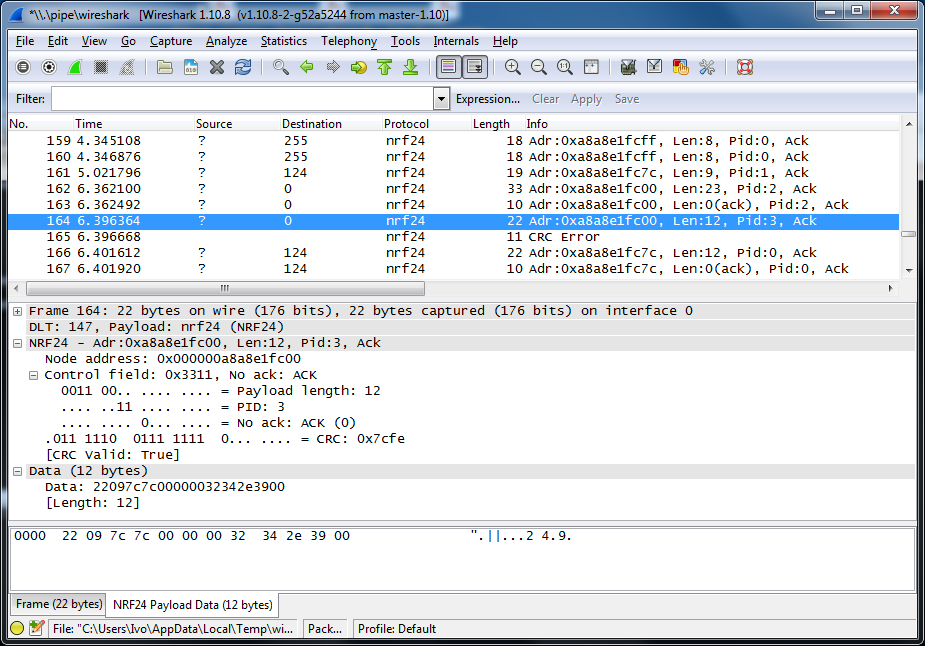
We’re sure that some of our readers are familiar with the difficult task that debugging/sniffing nRF24L01+ communications can be. Well, [Ivo] developed a sniffing platform based on an Arduino Uno, a single nRF24L01+ module and a computer running the popular network protocol analyzer Wireshark (part1, part2, part3 of his write-up).
As these very cheap modules don’t include a promiscuous mode to listen to all frames being sent on a particular channel, [Ivo] uses for his application a variation of [Travis Goodspeed]’s technique to sniff Enhance Shockburst messages. In short, it consists in setting a shorter than usual address, setting a fix payload length and deactivating the CRC feature. The Arduino Uno connected to the nRF24L01+ is therefore in charge of forwarding the sniffed frames to the computer. An application that [Ivo] wrote parses the received data and forwards it to wireshark, on which can be set various filters to only display the information you’re interested in.
 Last week we published a post about how it was discovered through trial and error that
Last week we published a post about how it was discovered through trial and error that