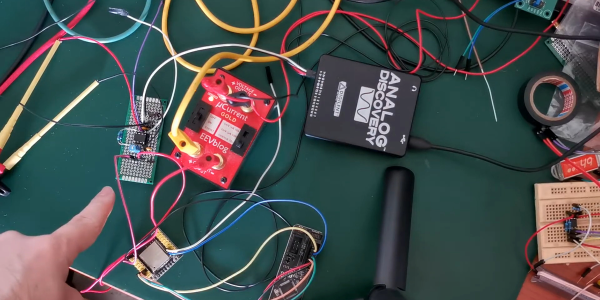
When it comes to the Internet of Things, many devices run off batteries, solar power, or other limited sources of electricity. This means that low power consumption is key to success. However, often these circuits draw relatively small currents that are difficult to measure, with plenty of transient current draw from their RF circuits. To effectively measure these low current draws, [Refik Hadzialic] built a cheap but accurate current probe.
The probe consists of a low value resistor of just 0.1 Ω, acting as a current shunt in series with the desired load. By measuring the voltage drop across this known resistor, it’s possible to calculate the current draw of the circuit.
However, the voltage drop is incredibly small for low current draws, so some amplification is needed. [Refik] does a great job of explaining his selection process, going deep into the maths involved to get the gain and part choice just right. The INA128P instrumentation amplifier from Texas Instruments was chosen, thanks to its good Common Mode Rejection Ratio (CMRR) and gain bandwidth.
The final circuit performs well, competing admirably with the popular uCurrent Gold measurement tool. While less feature-packed, [Refik]’s circuit appears to perform better in the noise stakes, likely due to the great CMRR rating of the TI part. It’s a great example of how the DIY approach can net solid results over and above simply buying something off the shelf.
Current sensing is a key skill to have in your toolbox, and can even help solve laundry disputes. Video after the break.
Continue reading “A Low-Cost Current Probe For IoT Applications”

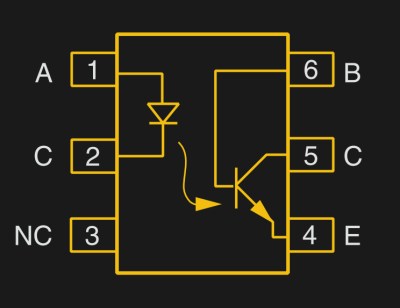 But first a step back. What is an optocoupler anyway? The prototype is an LED and a light-sensitive transistor stuck together in a lightproof case. But there are many choices for the receiver side: photodiodes, BJT phototransistors, MOSFETs, photo-triacs, photo-Darlingtons, and more.
But first a step back. What is an optocoupler anyway? The prototype is an LED and a light-sensitive transistor stuck together in a lightproof case. But there are many choices for the receiver side: photodiodes, BJT phototransistors, MOSFETs, photo-triacs, photo-Darlingtons, and more.









