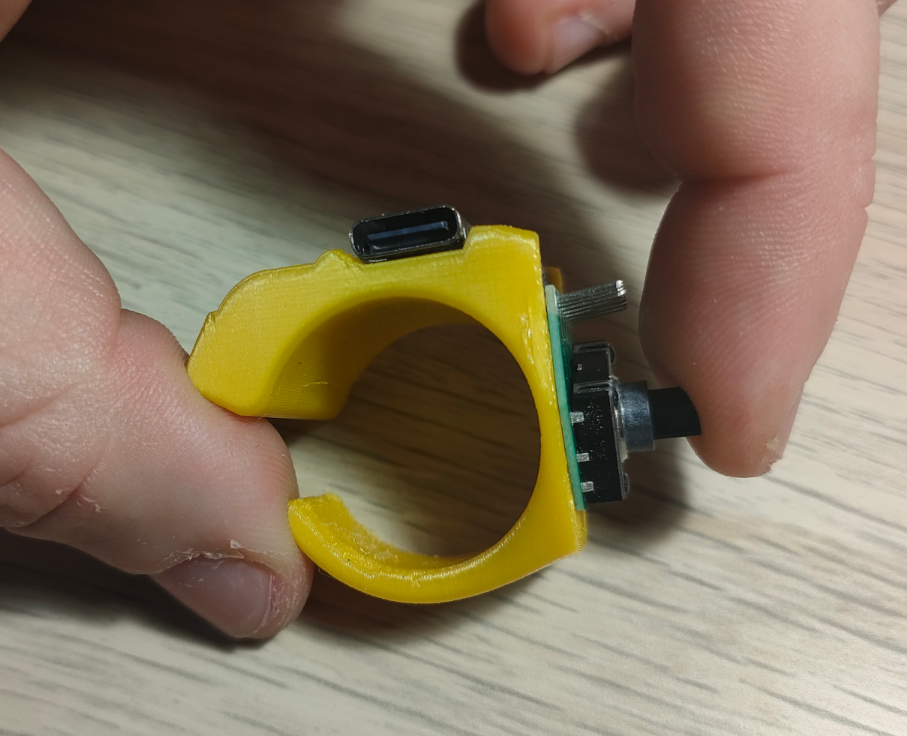
Have you ever wished for easy mouse controls to go along with your VR headset experience? Or maybe you just want a cooler way to mouse in general. In any case, look no further than [rafgaj78]’s Bluetooth Mouse Ring project.
This is version two, which of course comes with several improvements over version one. The biggest change is from tactile buttons to a joystick input. [rafgaj78] also did away with the power switch, using deep-sleep mode instead. Version two is easier to assemble and offers improved ergonomics, as well as a range of ring sizes.
Like the first version, this ring runs on a Seeed Xiao nRF52840 and is programmed in CircuitPython. There are two modes to choose from. In one mode, the joystick does left and right mouse click and wheel up and down, while the push action recovers the micro from deep sleep. In the other mode, the joystick axis is a mouse pointer mover, and you push down to left click.
For some gamers, having a light fast polling mouse is key. [Ali] of [Optimum Tech] loved his 23-gram mouse but disliked the cord. Not seeing any options for a comparable wireless mouse, he decided to make one himself.
Trying to shortcut the process, he started with an existing wireless mouse from Razer weighing in at a hefty 58 grams. The PCB on its own weighed in at 11 grams and after swapping to a smaller battery, [Ali] had a budget of 10 to 15 grams for the shell. Here is where the meat of this project lives. The everyday objects in your life like the poles that hold up traffic signals or the device you’re reading this article on are looked at and used without much thought into why they are what they are. The design of everyday things is a surprisingly deep field and designing a curvy mouse is no exception. With a 3d version of the PCB, he went through several iterations of how to lay out the mouse triggers. The scroll wheel was removed as he didn’t need it for the game he was playing.
The shell was printed in resin and came out great. [Ali] found himself with an ultralight 4000hz wireless mouse that was thoroughly enjoyable. It’s a great example of someone diving in and designing something for their personal use. Whether it’s a mouse or a chair, we love anyone taking on a design challenge. Video after the break.
We all have those gnarly hacks that we still think about years after we first saw them. For serial tipster [Inne], one of those is [Patrick Baudisch]’s soap mouse, which is a DIY device for mousing in mid-air that uses components from off the shelf and around the house.
How does it work? The guts are encased in plastic shaped like a flattened pill, which slips into a fuzzy sock. By squeezing it a bit, the plastic pill rotates, spinning the outward-facing sensor round and round. Although we briefly reported on the soap mouse way back in 2006, we think it deserves to be in the spotlight today, especially since there’s a complete PDF guide to building one that’s optimized for gaming. If you want a regular pointing device instead, the conversion is described within.
[Patrick] uses a CompUSA (RIP) mouse in the guide, but any sufficiently slim and also short mouse should work as long as it has a decently long focal range, which is necessary for the sensor to see the hull. Plenty of travel mice out there should fit the bill.
The hull itself is made from two small (empty) bottles of hand sanitizer, chosen for their size, shape, and clarity of plastic. The outermost housing is a baby sock with a snap sewn on. [Patrick] says moving the sock against the plastic is difficult, and has tried various methods for lubrication, such as a bit of mineral oil inside some plastic bags.
Be sure to check out the video after the break, which does a great job of explaining everything from the various types of interaction to construction in 5½ minutes.
Since 2006, [Patrick] has held workshops where people have built their own soap mice. Have you built one? Let us know in the comments. And don’t forget about the Digi-Key-sponsored Odd Inputs and Peculiar Peripherals contest, which runs through July 4th. Declare your independence from regular keyboards and mice and win big!
In 1980, Logitech started selling a round, three-button input device known the Depraz mouse or Swiss mouse, which was made by — you guessed it — a Swiss company called Depraz. At the time, Logitech was primarily a software development outfit, but the success they saw in selling the Depraz mouse led them to leave logic and looping behind in order to pursue peripherals permanently.
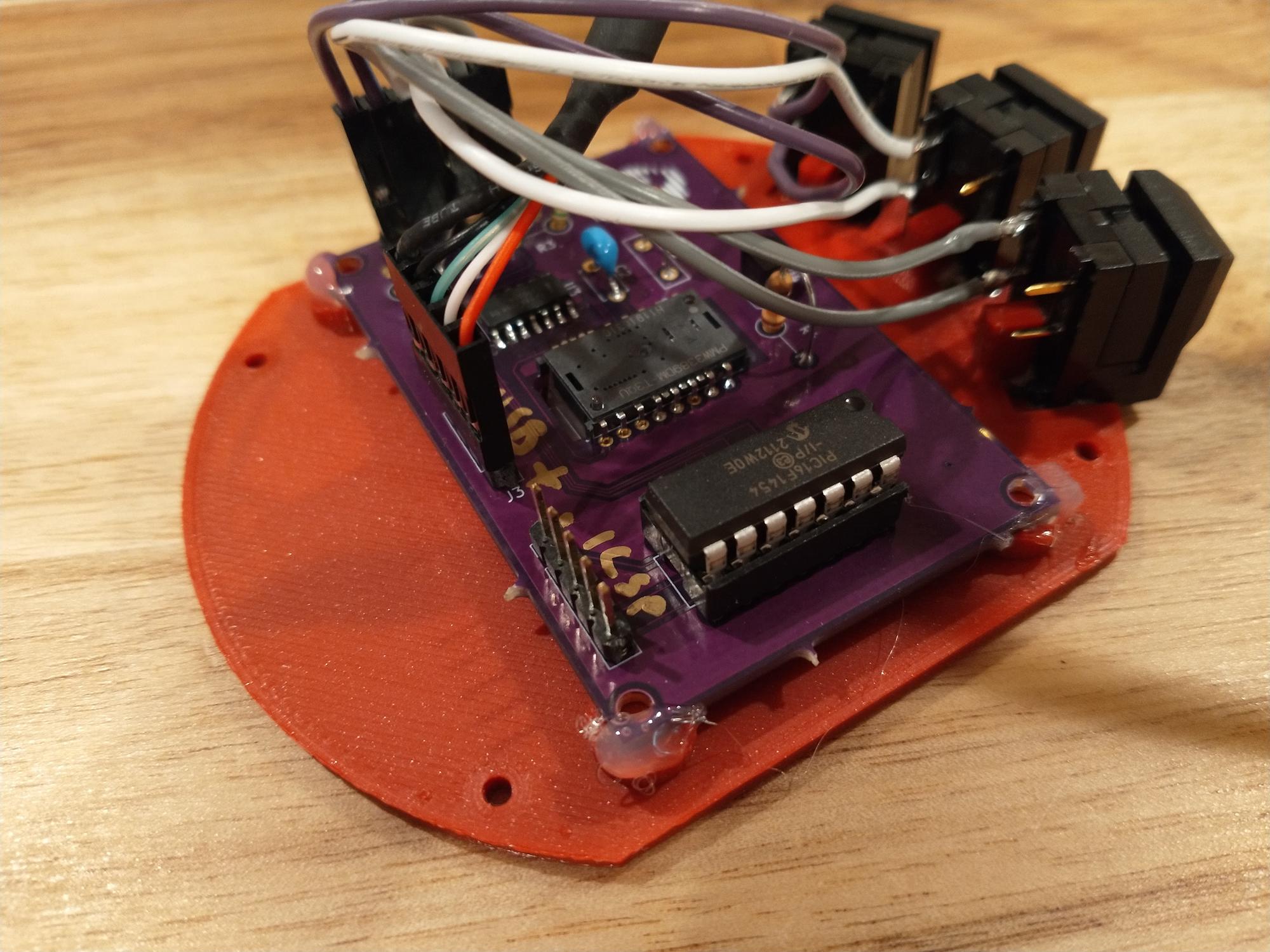
The Bellwether mouse sports a high-end Pixart PMW3389 sensor and uses a PIC16F1454 for the controller. The most complicated part was dealing with voltage levels, because the PIC wants 5 V and the sensor only 2 V. The firmware is a mix of Microchip’s USB HID demo code and [Daniel Kao]’s Arduino code for the PWM3389 sensor.
Unlike the original Depraz’s male DE-9 connector, this updated version connects via USB. We like that [John] learned FreeCAD in order to make the body, and especially that he glued fishing weights to the underside for more heft. Check it out in action after the break. We were most curious about those switches, which at first glance look like they could be keyswitches with DSA keycaps. But no, they’re just some cool switches from the depths of Digi-Key.
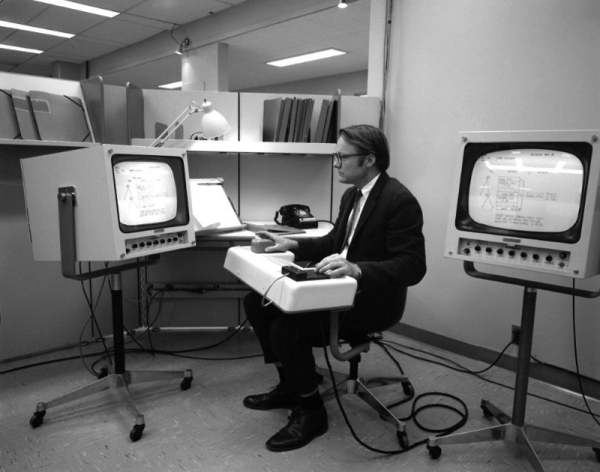
Bill at the controls at Stanford Research Institute. Image via MSN
Every piece of technology starts with a vision, a vague notion of how a thing could or should be. The computer mouse is no different. In fact, the mouse was built to be an integral part of the future of personal computing — a shift away from punch cards and mystery toward a more accessible and user-friendly system of windowed data display, hyperlinks, videoconferencing, and more. And all of it would be commanded by a dot on the screen moving in sync with the operator’s intent, using a piece of hardware controlled by the hand.
The stuff of science fiction becomes fact anytime someone has the means to make it so. Often times the means includes another human being, a intellectual complement who can conjure the same rough vision and fill in the gaps. For Douglas Engelbart’s vision of the now-ubiquitous computer mouse, that person was William English.
William English was born January 27, 1929 in Lexington, Kentucky. His father was an electrical engineer and William followed this same path after graduating from a ranch-focused boarding school in Arizona. After a stint in the Navy, he took a position at Stanford Research Institute in California, where he met Douglas Engelbart.
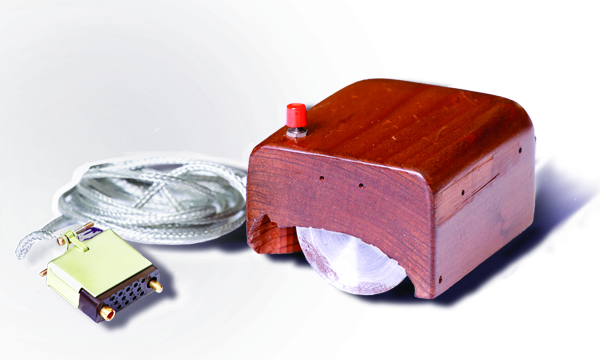
The first computer mouse, built by William English in the 1960s. Image via Wikipedia
Engelbart showed William his notes and drawings, and he built the input device that Englebart envisioned — one that could select characters and words on the screen and revolutionize text editing. The X/Y Position Indicator, soon and ever after called the mouse: a sort of rough-yet-sleek pinewood derby car of an input device headed into the future of personal computing.
William’s mouse was utilitarian: a wooden block with two perpendicular wheels on the bottom, and a pair of potentiometers inside to interpret the wheels’ X and Y positions. The analog inputs are converted to digital and represented on the screen. The first mouse had a single button, and the cord was designed to run out the bottom, not the top.
What do you do when you’re into trackball mice, but nothing out there is affordable or meets all your murine needs? You build one, of course. And if you’re like [Dangerously Explosive], who has a bunch of old optical mice squeaking around the shop, you can mix and match them to build the perfect one.
The mouse, which looks frozen mid-transformation into a rodential assassin, is a customized work of utilitarian art. Despite the excellent results, this project was not without its traps. [Dangerously] got really far into the build before discovering the USB interface chip was dead. Then he tried to sculpt a base out of Plasticine and discovered he’d bought the one kind of clay that can’t be baked. After trying his hand at making homemade salt dough, he painstakingly whittled a base from scrap pine using a drill and a hacksaw.
Every bit of this mouse is made from recycled bits, which, if you pair that with the paint job and the chosen shade of blinkenlights, makes this a green mouse on three levels. One of the two parts of this mouse that isn’t literally green, the cord, is still ecologically sound. [Dangerously] wanted a really long tail, so he scavenged a charger cable built for fruity hardware and threaded it through a hollowed-out piece of purple paracord.
We love the thumb-adjacent scroll wheel and the trackball itself, which is a ping pong ball painted black. The cool part is the guide it rolls around in. [Dangerously] spent a long time hand-whittling the perfect size hole in a particularly wide mouse palm rest. All that plastic shaving paid off, because the action is smooth as Velveeta.
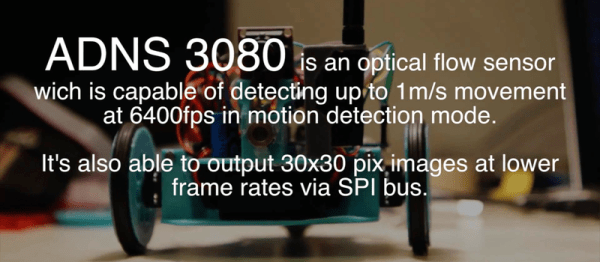
[Neumi] wrote in with a sweet robotics hack. It’s a 2D laser distance sensor (YouTube) made with a cheap line laser and an optical mouse’s flow-sensor chip used as a low-resolution camera. In one sense, it’s a standard laser-distance-sensor project. But it is clever for a whole bunch of reasons.
For one, using a mouse sensor as a low-res camera is awesome. It’s designed to read from a standard red LED, so the sensitivity is in just the right ballpark for use with a line laser. It returns a 30×30 pixel greyscale image, which is just about the right amount of data for a low-end microcontroller to handle and keep up with the framerate without resorting to coding tricks.
It’s also no coincidence that these sensors are available with lenses built in, for relatively cheap, on eBay. Apparently the quadcopter gurus use them as if they were mice to visually track their quad’s motion. Hacker spillover!
Detecting the laser line as it reflects off of whatever objects are lying on [Neumi]’s floor could also possibly prove difficult, and might produce false readings in the presence of background illumination. So [Neumi] takes two readings with the camera — one with the laser on and one with it off — and differences them. Done fast enough, this should reduce any non-laser sources down to the sensor’s noise floor. Finally, there’s some thresholding and averaging going on behind the scenes that help make everything work out right. The code is up on GitHub.
Not a bad build for a 2D laser distance system on a budget. If you want to shell out a bit more money, and are into a seriously involved build, this is probably the slickest we’ve seen in a long time. And if you’re thinking that you’ve heard of [Neumi] before, you’re right: we featured this 405mm laser PCB exposer / burner CNC machine just a few months ago.

 This is version two, which of course comes with several improvements over version one. The biggest change is from tactile buttons to a joystick input. [rafgaj78] also did away with the power switch, using deep-sleep mode instead. Version two is easier to assemble and offers improved ergonomics, as well as a range of ring sizes.
This is version two, which of course comes with several improvements over version one. The biggest change is from tactile buttons to a joystick input. [rafgaj78] also did away with the power switch, using deep-sleep mode instead. Version two is easier to assemble and offers improved ergonomics, as well as a range of ring sizes.