Drones are pretty common in the electoronics landscape today, and are more than just a fun hobby. They’ve enabled a wide array of realtors, YouTubers, surveyors, emergency responders, and other professionals to have an extremely powerful tool at their disposal. One downside to these tools is that the power consumption tends to be quite high. You can either stick larger batteries on them, or, as [Nicholas] demonstrates, just spin them really fast during flight.
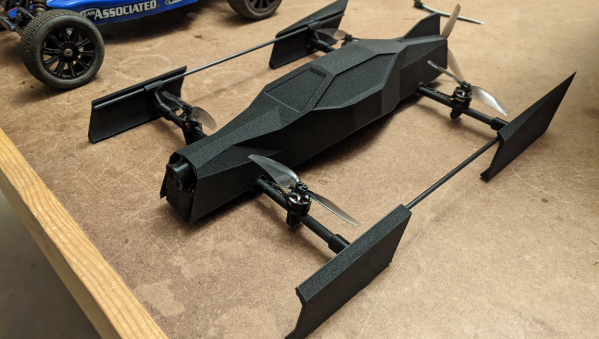
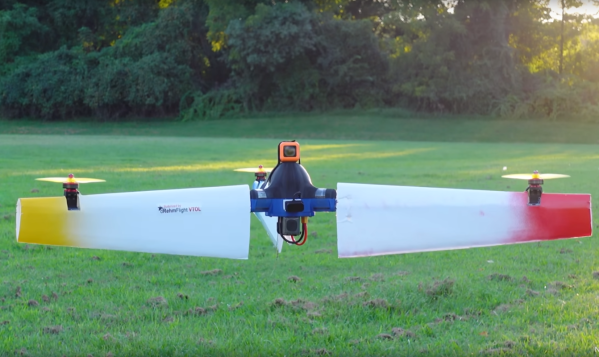
We featured his first tests with this multi-modal drone flight style a while back, but here’s a quick summary: by attaching airfoils to the arms of each of the propellers and then spinning the entire drone, the power requirements for level flight can be dramatically reduced. This time, he’s back to demonstrate another benefit to this unique design, which is its ability to turn on its side and fly in level flight like an airplane. It’s a little bizarre to see it in the video, as it looks somewhat like a stationary propeller meandering around the sky, but the power requirements for this mode of flight are also dramatically reduced thanks to those wings on the arms.
There are a few downsides to this design, namely that the vertical wing only adds drag in level flight, so it’s not as efficient as some bi-wing designs, but it compromises for that loss with much more effective hover capabilities. He also plans to demonstrate the use of a camera during spin-hover mode as well in future builds. It’s an impressive experiment pushing the envelope of what a multi-rotor craft can do, and [Nicholas] still has plans to improve the design, especially when it comes to adding better control when it is in spin-hover mode. We’d expect plenty of other drones to pick up some of these efficiency gains too, except for perhaps this one.
Continue reading “Winged Drone Gets Forward Flight Capability”