
It’s 2025 and we still don’t have flying cars — but we’ve got this full-scale flying DeLorean prop from [Brian Brocken], and that’s almost as good. It’s airborne and on camera in the video embedded below.
We’ve written about this project before; first about the mega-sized CNC router [Brian] used to carve the DeLorean body out of Styrofoam panels, and an update last year that showed the aluminum frame and motorized louvers and doors.
Well, the iconic gull-wing doors are still there, and still motorized, and they’ve been joined by a tire-tilting mechanism for a Back To The Future film-accurate flight mode. With the wheels down, the prop can use them to steer and drive, looking for all the world like an all-white DMC-12.
The aluminum frame we covered before is no longer in the picture, though. It’s been replaced by a lighter, stiffer version made from carbon fibre. It’s still a ladder frame, but now with carbon fiber tubes and “forged” carbon fiber corners made of tow and resin packed in 3D printed molds. There’s been a tonne of work documented on the build log since we last covered this project, so be sure to check it out for all the details.
Even in unpainted white Styrofoam, it’s surreal to see this thing take off; it’s the ultimate in practical effects, and totally worth the wait. Honestly, with talent like [Brian] out there its a wonder anyone still bothers with CGI, economics aside.
Thanks to [Brian] for the tip! If you have a project you’ve hit a milestone with, we’d love to see it, even if it doesn’t trigger the 80s nostalgia gland we apparently all have embedded in our brains these days. Send us a tip!
Continue reading “Full Scale Styrofoam DeLorean Finally Takes Flight”




 There is no denying that personal drones are in the public eye these days. Unfortunately they tend to receive more negative press than positive. This past weekend, there were news reports of a wildfire in California.
There is no denying that personal drones are in the public eye these days. Unfortunately they tend to receive more negative press than positive. This past weekend, there were news reports of a wildfire in California. 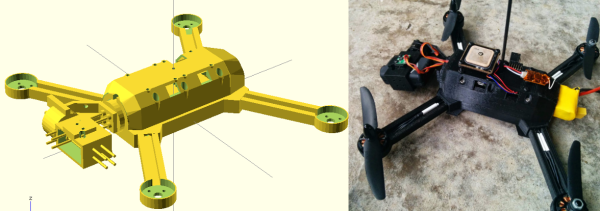
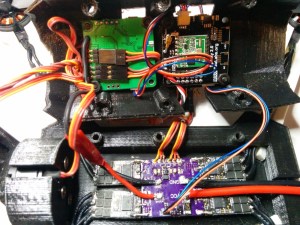 layout clean, [James] designed a power distribution board which solders right up to the ESCs. The internal layout is seriously clean, with flat panels which keep the electronics safe during crashes.
layout clean, [James] designed a power distribution board which solders right up to the ESCs. The internal layout is seriously clean, with flat panels which keep the electronics safe during crashes.








