The Parallax Propeller is an exceptionally interesting chip that doesn’t get the love it deserves. It’s a 32-bit microcontroller with eight independent cores that are each powerful enough to do some real computation. Around this time last year, the source for the Propeller was opened up and released under GPL 3.0, along with the mask ROM and an interpreter for the Propeller-specific language, Spin. This release is not only a great educational opportunity, but a marvelous occasion to build some really cool hardware as [antti.lukats] is doing with the Soft Propeller.
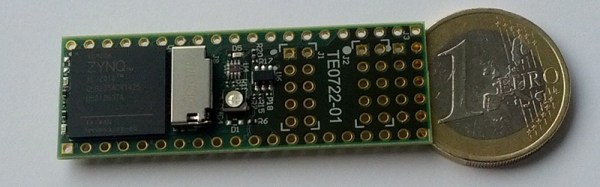
[antti]’s Soft Propeller is based on the Xilinx ZYNQ-7000, a System on Chip that combines a dual core ARM Cortex A9 with an FPGA with enough logic gates to become a Propeller. The board also has 16MB of Flash used for configuration and everything fits on a Propeller-compatible DIP 40 pinout. If you’ve ever wanted to play around with FPGAs and high-power ARM devices, this is the project for you.
[antti] already has the Propeller Verilog running on his board, and with just a bit more than 50% of the LUTs used, it might even be possible to fit the upcoming Propeller 2 on this chip. This build is just one small part of a much larger and more ambitious project: [antti] is working on a similar device with HDMI, USB, a MicroSD, and 32MB of DDR2 RAM. This will also be stuffed into a DIP40 format, making it an incredibly powerful system that’s just a bit larger than a stick of gum.


 There is no denying that personal drones are in the public eye these days. Unfortunately they tend to receive more negative press than positive. This past weekend, there were news reports of a wildfire in California.
There is no denying that personal drones are in the public eye these days. Unfortunately they tend to receive more negative press than positive. This past weekend, there were news reports of a wildfire in California. 









