There was a lot of enthusiasm surrounding Mars arrival of Perseverance rover, our latest robotic interplanetary explorer. Eager to capitalize on this excitement, NASA JPL released a lot of information to satisfy curiosity of the general public. But making that material widely accessible also meant leaving out many technical details. People who crave just a little more can head over to How NASA’s Perseverance Landed On Mars: An Aerospace Engineer Breaks It Down In Fascinating Detailpublished by Jalopnik.
NASA JPL’s public materials mostly explained the mission in general terms. Even parts with scientific detail were largely constrained for a target audience of students K-12. Anyone craving more details can certainly find them online, but they would quickly find themselves mired in highly technical papers written by aerospace engineers and planetary geologists for their peers. There is a gap in between those extremes, and this write-up slots neatly in that gap. Author [Brian Kirby] is our helpful aerospace engineer who compiled many technical references into a single narrative of the landing, explained at a level roughly equivalent to undergraduate level math and science courses.
We get more details on why the target landing site is both geologically interesting and technically treacherous, requiring development of new landing smarts that will undoubtedly help future explorers both robotic and human. The complex multi-step transition from orbit to surface is explained in terms of managing kinetic energy. Condensing a wide range of problems to a list of numbers that helps us understand why, for example, a parachute was necessary yet not enough to take a rover all the way to the surface.
Much of this information is known to longtime enthusiasts, but we all had to get our start somewhere. This is a good on-ramp for a new generation of space fans, and together we look forward to Perseverance running down its long and exciting to-do list. Including flying a helicopter, packing up surface samples of Mars, and seeing if we can extract usable oxygen from Martian atmosphere.
The rule of thumb with planetary exploration so far has been, “What goes up, stays up.” With the exception of the Moon and a precious few sample return missions to asteroids and comets, once a spacecraft heads out, it’s never seen again, either permanently plying the void of interplanetary or interstellar space, or living out eternity on the surface of some planet, whether as a monument to the successful mission that got it there or the twisted wreckage of a good attempt.
At the risk of jinxing things, all signs point to us getting the trip to Mars reduced to practice, which makes a crewed mission to Mars something that can start turning from a dream to a plan. But despite what some hardcore Martian-wannabees say, pretty much everyone who goes to Mars is going to want to at least have the option of returning, and the logistical problems with that are legion. Chief among them will be the need for propellants to make the return trip. Lugging them from Earth would be difficult, to say the least, but if an instrument the size of a car battery that hitched a ride to Mars on Perseverance has anything to say about it, future astronauts might just be making their own propellants, literally pulling them out of thin air.
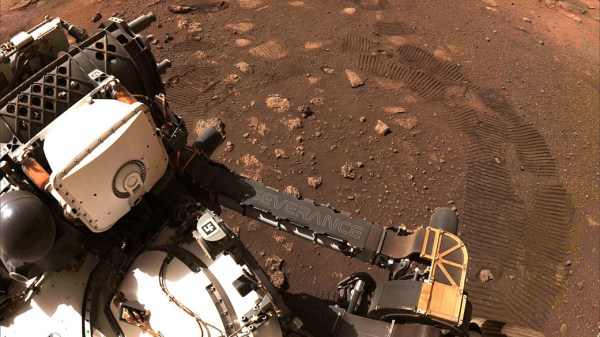
There’s a special kind of anxiety that comes from trying out a robotic project for the first time. No matter the size, complexity, or how much design and planning has gone into it, the first time a creation moves under its own power can put butterflies in anyone’s stomach. So we can imagine that many people at NASA are breathing a sigh of relief now that the Perseverance rover has completed its first successful test drive on Mars.
To be fair, Perseverance was tested here on Earth before launch. However, this is the first drive since the roving scientific platform was packed into a capsule, set on top of a rocket, and flung hundreds of millions of miles (or kilometers, take your pick) to the surface of another planet. As such, and true to NASA form, the operators are taking things slow.
This joyride certainly won’t be setting speed records. The atomic-powered vehicle traveled a total of just 21.3 feet (6.5 meters) in 33 minutes, including forward, reverse, and a 150 degree turn in-between. That’s enough for the mobility team to check out the drive systems and deem the vehicle worthy of excursions that could range 656 feet (200 meters) or more. Perseverance is packed with new technology, including an autonomous navigation system for avoiding hazards without waiting for round-trip communication with Earth, and everything must be tested before being put into full use.
A couple weeks have passed since the world was captivated by actual video of the rover’s entry, descent, and landing, and milestones like this mark the end of that flashy, rocket-powered skycrane period and the beginning of a more settled-in period, where the team works day-to-day in pursuit of the mission’s science goals. The robotic arm and several on-board sensors and experiments have already completed their initial checks. In the coming months, we can look forward to tons of data coming back from the red planet, along with breathtaking pictures of its alien surface and what will hopefully be the first aircraft flown on another world.
The sky crane system used on the Perseverance and Curiosity Mars rovers is a challenging control system problem that piqued [Nicholas Rehm]’s curiosity. Constrained to Earth, he decided to investigate the problem using a drone and a rock.
The setup and the tests are simple, but clearly illustrate the problem faced by NASA engineers. [Nicholas] attached a winch mechanism to the bottom of a racing-type quadcopter, and tied a mass to the end of the winch line. At first, he built a foam model of the rover, but it proved to be unstable in the wake of the quadcopter’s propellers, so he used a rock instead. The tests start with the quadcopter taking off with the rock completely retracted, which is then slowly lowered in flight until it reaches the end of the line and drops free. As soon as the rock was lowered, it started swinging like a pendulum, which only got worse as the line got longer. [Nicholas] attempted to reduce the oscillations with manual control inputs, but this only made it worse. The quadcopter is also running [Nicholas]’s own dRehmFlight flight controller that handles stabilization, but it does not account for the swinging mass.
[Nicholas] goes into detail on the dynamics of this system, which is basically a two-body pendulum. The challenges of accurately controlling a two-body pendulum are one of the main reasons the sky crane concept was shelved when first proposed in 1999. Any horizontal movement of either the drone or the rock exerts a force on the other body and will cause a pendulum motion to start, which the control system will not be able to recover from if it does not account for it. The real sky crane probably has some sort of angle sensing on the tether which can be used to compensate for any motion of the suspended rover. Continue reading “Demonstrating The Mars Rover Pendulum Problem With A Drone On Earth”→
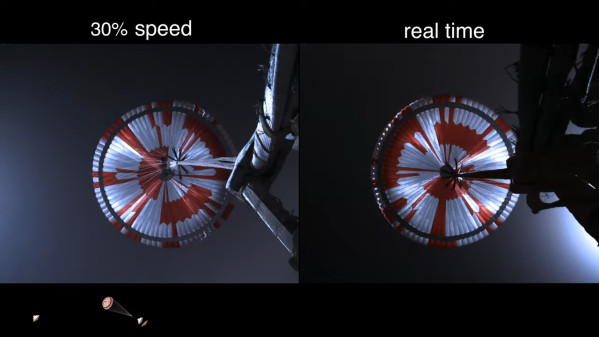
The much-anticipated video from the entry descent and landing (EDL) camera suite on the Perseverance rover has been downlinked to Earth, and it does not disappoint. Watch the video below and be amazed.
The video was played at the NASA press conference today, which is still ongoing as we write this. The brief video below has all the highlights, but the good stuff from an engineering perspective is in the full press conference. The level of detail captured by these cameras, and the bounty of engineering information revealed by these spectacular images, stands in somewhat stark contrast to the fact that they were included on the mission mainly as an afterthought. NASA isn’t often in the habit of adding “nice to have” features to a mission, what with the incredible cost-per-kilogram of delivering a package to Mars. But thankfully they did, using mainly off-the-shelf cameras.
The camera suite covered nearly everything that happened during the “Seven Minutes of Terror” EDL phase of the mission. An up-looking camera saw the sudden and violent deployment of the supersonic parachute — we’re told there’s an Easter egg encoded into the red-and-white gores of the parachute — while a down-looking camera on the rover watched the heat shield separate and fall away. Other cameras on the rover and the descent stage captured the skycrane maneuver in stunning detail, both looking up from the rover and down from the descent stage. We were surprised by the amount of dust kicked up by the descent engines, which fully obscured the images just at the moment of “tango delta” — touchdown of the rover on the surface. Our only complaint is not seeing the descent stage’s “controlled disassembly” 700 meters away from the landing, but one can’t have everything.
Honestly, these are images we could pore over for days. The level of detail is breathtaking, and the degree to which they make Mars a real place instead of an abstract concept can’t be overstated. Hats off to the EDL Imaging team for making all this possible.
Well, that was quite a show! The Perseverance rover arrived on Mars Thursday. Don’t tell the boss, but we spent the afternoon watching the coverage in the house on the big TV rather than slaving away in the office. It was worth it; for someone who grew up watching Jules Bergman and Frank Reynolds cover the Apollo program and the sometimes cheesy animations provided by NASA, the current coverage is pretty intense. A replay of the coverage is available – skip to about the 1:15:00 mark to avoid all the filler and fluff preceding the “Seven Minutes of Terror” main event. And not only did they safely deliver the package, but they absolutely nailed the landing. Perseverance is only about 2 km away from the ancient river delta it was sent to explore for signs of life. Nice shooting!
We’re also being treated to early images from Jezero crater. The first lowish-rez shots, from the fore and after hazard cameras, popped up just a few seconds after landing — the dust hadn’t even settled yet! Some wags complained about the image quality, apparently without thinking that the really good camera gear was stowed away and a couple of quick check images with engineering cameras would be a good idea while the rover still had contact with the Mars Reconnaissance Orbiter. Speaking of which, the HiRISE camera on the MRO managed to catch a stunning view of Perseverance’s descent under its parachute; the taking of that photo is an engineering feat all by itself. But all of this pales in comparison to a shot from one of the down-looking cameras in the descent stage, show Perseverance dangling from the skycrane just before touchdown. It was a really good day for engineering.
Would that our Earthly supply chains were as well-engineered as our Martian delivery systems. We’ve been hearing of issues all along the electronics supply chain, impacting a wide range of industries. Some of the problems are related to COVID-19, which has sickened workers staffing production and shipping lines. Some, though, like a fire at the AKM semiconductor plant in Japan, have introduced another pinch point in an already strained system. The fire was in October, but the impact on the manufacturer depending on the plant’s large-scale integration (LSI) and temperature-compensated crystal oscillators (TCXO) products is only just now being felt in the amateur radio market. The impact is likely not limited to that market, though — TCXOs pop up lots of gear, and the AKM plant made LSI chips for all kinds of applications.
What do you get when you combine a 3D-printer, a laser cutter, a CNC router, and a pick-and-place robot? Drones that fly right off the build plate, apparently. Aptly enough, it’s called LaserFactory, and it comes from MITs Computer Science and Artificial Intelligence Lab. By making different “bolt-on” tools for a laser cutter, the CSAIL team has combined multiple next-generation manufacturing methods in one platform. The video below shows a drone frame being laser-cut from acrylic, to which conductive silver paste is added by an extruder. A pick-and-place head puts components on the silver goo, solders everything together with a laser, and away it goes. They also show off ways of building up 3D structures, both by stacking up flat pieces of acrylic and by cutting and bending acrylic in situ. It’s obviously still just a proof of concept, but we really like the ideas presented here.
And finally, as proof that astronomers can both admit when they’re wrong and have fun while doing so, the most remote object in the Solar System has finally received a name. The object, a 400-km diameter object in a highly elliptical orbit that takes it from inside the orbit of Neptune to as far as 175 astronomical units (AU) from the Sun, is officially known as 2018 AG37. Having whimsically dubbed the previous furthest-known object “Farout,” astronomers kept with the theme and named its wayward sister “Farfarout.” Given the rapid gains in technology, chances are good that Farfarout won’t stay the Sun’s remotest outpost for long, and we fear the (Far)nout trend will eventually collapse under its own weight. We therefore modestly propose a more sensible naming scheme, perhaps something along the lines of “Farthest McFaraway.” It may not scale well, but at least it’s stupid.
On February 18th, the Perseverance rover safely touched down on the Martian surface. In the coming days and weeks, the wide array of instruments and scientific payloads tucked aboard the robotic explorer will spring to life; allowing us to learn more about the Red Planet. With a little luck, it may even bring us closer to determining if Mars once harbored life as we know it.
Among all of the pieces of equipment aboard the rover, one of the most intriguing must certainly be Ingenuity. This small helicopter will become the first true aircraft to take off and fly on another planet, and in a recent interview with IEEE Spectrum, operations lead [Tim Canham] shared some fascinating details about the vehicle and some of the unorthodox decisions that went into its design.
Ingenuity’s downward facing sensors.
[Tim] explains that, as a technology demonstrator, the team was allowed to take far more risks in developing Ingenuity than they would have been able to otherwise. Rather than sticking with legacy hardware and software, they were free to explore newer and less proven technology.
That included off-the-shelf consumer components, such as a laser altimeter purchased from SparkFun. It also means that the computational power packed into Ingenuity far exceeds that of Perseverance itself, though how well the helicopter’s smartphone-class Snapdragon 801 processor will handle the harsh Martian environment is yet to be seen.
On the software side, we also learn that Ingenuity is making extensive use of open source code. Not only is the onboard computer running Linux, but the vehicle is being controlled by an Apache 2.0 licensed framework developed by NASA’s Jet Propulsion Laboratory for CubeSats and other small spacecraft. The project is available on GitHub for anyone who wants it, and according to the changelog, the fixes and improvements required for the “Mars Helicopter Project” were merged in a few releases ago.
The fact that code currently ticking away on the surface of Mars can be downloaded and implemented into your own DIY project is a revelation that’s not lost on [Tim]. “It’s kind of an open-source victory because we’re flying an open-source operating system and an open-source flight software framework and flying commercial parts that you can buy off the shelf if you wanted to do this yourself someday.”
Of course, it took a whole lot more than some Python libraries and a handful of sensors from SparkFun to design and build the first space-going helicopter. But the fact that even a small slice of the technology inside of a project like Ingenuity is now available to the average hacker and maker is a huge step towards democratizing scientific research here on Earth.