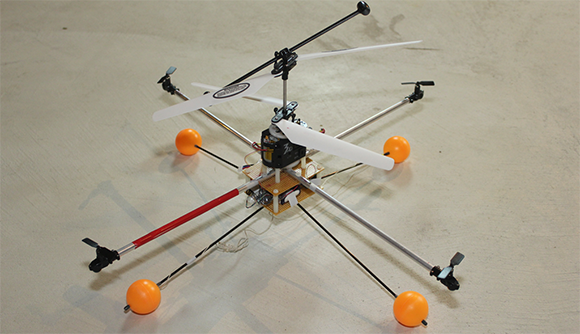
[execUc] took a stock V929 quadcopter and started making some crafty customizations. The main change – the control electronics were replaced by an Arduino Pro Mini (16Mhz model). He soldered all the modules on a prototyping board and, although admittedly a bit heavy, the little guy takes flight with no problem.
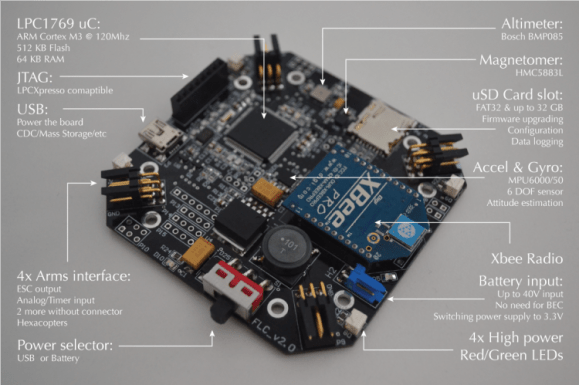
Among other details, an HMC5883L (magnetometer) and MPU6050 (accelerometer / gyroscope) are used as sensors. A LiPo 7.4V battery pack supplies the power. The brushed motors are controlled by pulse-width modulation from SI2302 MOSFET with added diodes. He plans to swap out the micro-controller for an ARM7 stm32F103 for extra computing power, and needs to play with the PID values to correct a slight problem he seems to be having when rotating.
Check out a test flight video after the break. [execUc] has a thorough list of all the alterations he made in the video description, so be sure to read it.
[via Hacked Gadgets]