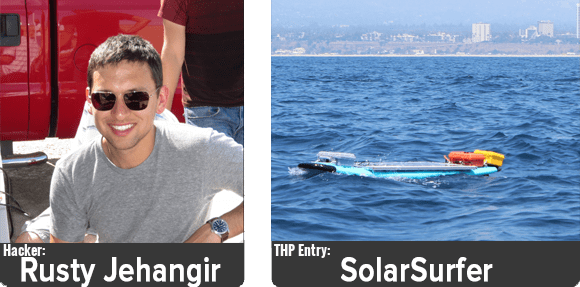
[Rusty]’s project for the Hackaday Prize is extremely ambitious. He’s planning on sending an autonomous craft across the ocean, from LA to Hawaii, a distance that will end up being well over 2,500 miles The best part about this project? It’s already had some time in the ocean, cruising off the coast of southern California under its own power for a distance of 20km.
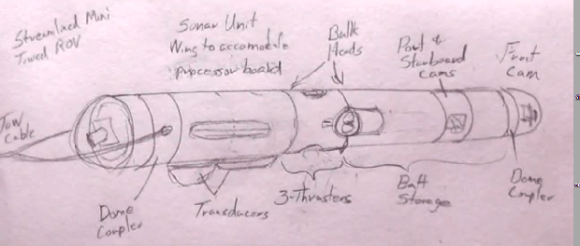
Why is [Rusty] doing this? Partly because he wanted to do something no one had ever done before. For him, this meant developing a cheap underwater thruster, building an autonomous solar-powered surfboard for a months-long voyage halfway across the Pacific. It’s a small step to the goal of exploring the deep ocean with his thruster and mostly off the shelf parts, but already [Rusty] has learned a lot about electronics in a marine environment and being confident enough to let a project go on its own for months at a time.
Interview below.