Yesterday Microsoft announced their new cable box, the Xbox One. Included in the announcement is a vastly improved Kinect sensor. It won’t be available until next Christmas, but now the question is what are we going to do with it?
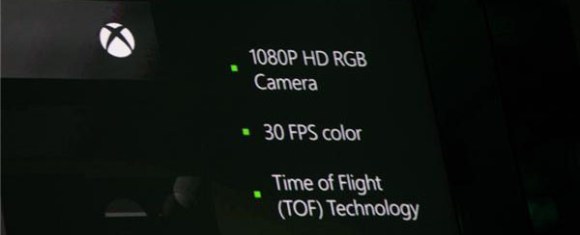
From what initial specs that can be found, the new version of the Kinect will output RGB 1080p video over a USB 3.0 connection to the new Xbox. The IR depth camera of the original Kinect has been replaced with a time of flight camera – a camera that is able to send out a pulse of light and time how long it takes for photons to be reflected back to the camera. While there have been some inroads into making low-cost ToF cameras – namely Intel and Creative’s Interactive Gesture Camera Development Kit and the $250 DepthSense 325 from SoftKinetic – the Kinect 2.0 will be the first time of flight camera you’ll be able to buy for a few hundred bucks at any Walmart.
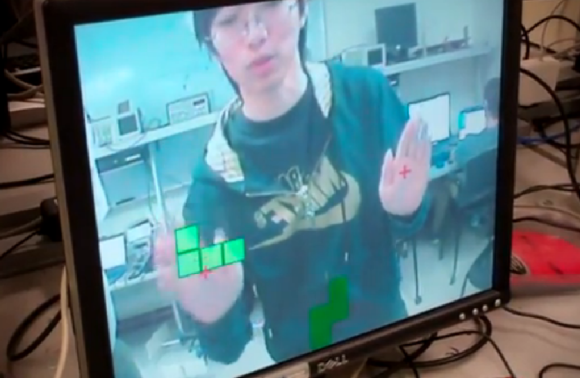
We’ve seen a ton of awesome Kinect hacks over the years. Everything from a ‘holographic display’ that turns any TV into a 3D display, computer vision for robots, and a 3D scanner among others. A new Kinect sensor with better 3D resolution can only improve existing projects and the time of flight sensor – like the one found in Google’s driverless car – opens up the door for a whole bunch of new projects.
So, readers of Hackaday, assuming someone can write a driver in a few days like the Kinect 1.0, what are we going to do with it?
While we’re at it, keep in mind we made a call for Wii U controller hacks. If somebody can crack that nut, it’ll be an awesome remote for robots and FPV airplanes and drones.