NEMA-17 steppers are (almost) a dime a dozen. They’re everywhere, they’re well-known to hackers and makers, and yet they’re still a bit hard to integrate into projects. That’s because the motor alone isn’t much use, and by the time you find or build a driver and integrate it with a microcontroller, you’ve probably expended more effort than you will on the rest of the project. This USB-C PD stepper driver aims to change that.
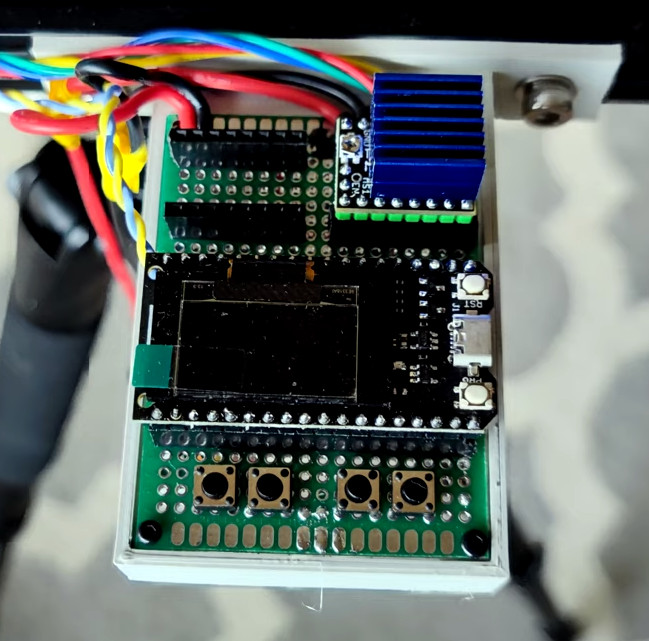
What caught our eye about [Josh Rogan]’s PD Stepper is his effort to make this a product rather than just a project. The driver is based on a TMC2209 for silent operation and a lot of torque thanks to the power delivery capabilities of USB-C PD. The PCB is very nicely designed and has an AS5600 rotary magnetic encoder for closed-loop operation. There’s also an ESP32-S3 on-board, so WiFi and Bluetooth operation are possible — perfect for integration into Home Assistant via ESPHome.
[Josh]’s mechanical design is top-notch, too, with a machined aluminum spacer that fits on the back of a NEMA-17 motor perfectly and acts as a heat spreader. A machined polycarbonate cover protects the PCB and makes a very neat presentation. [Josh] has kits available, or you can roll your own with the provided build files.
Continue reading “Compact Driver Powers Steppers With USB-C PD”