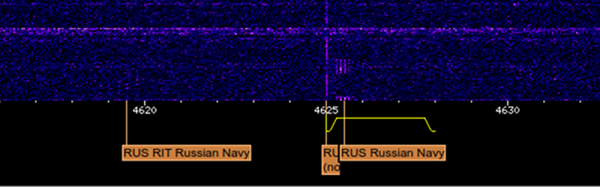
If you have a shortwave receiver, tune it to 4625 kHz. You’ll hear something that on the surface sounds strange, but the reality is even stranger still. According to the BBC, the radio station broadcasts from two locations inside Russia — and has since 1982 — but no one claims ownership of the station, known as MDZhB. According to the BBC:
[For 35 years, MDZhB] has been broadcasting a dull, monotonous tone. Every few seconds it’s joined by a second sound, like some ghostly ship sounding its foghorn. Then the drone continues.
Once or twice a week, a man or woman will read out some words in Russian, such as “dinghy” or “farming specialist”. And that’s it.
If you don’t have a shortwave handy, you can always try one of the many web-based software defined radios. Search for 4.6 MHz, and pick a location that should have propagation to Russia and you are all set.