When [Mike] fired up his PCjr webserver back in March, he probably wasn’t expecting it to go viral. 2640 hours later, here we are! Not only has his machine run continuously for over 110 days, it also is surviving a global hug of death. All of this is thanks to some very special software.
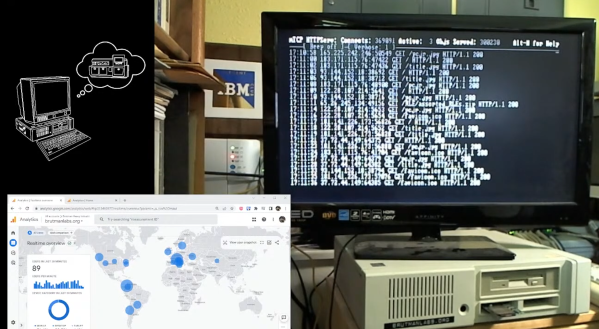
We see lots of old machines here on Hackaday. We also see lots of minimal web servers. But we don’t see many that can run for thousands of hours, offering up to 8 simultaneous connections. Curious if jr is still up? Check brutmanlabs.org. The whole website is hosted on the 40-year-old machine. If you want to be a bit more kind, here’s a direct link to the text-only status page. While many of those hours were idle, currently lots of folks are hitting that little V20 CPU, so please give it a few seconds to respond.
The PCjr has a few upgrades — the aforementioned V20 CPU upgrade, a jrIDE sidecar, and a memory upgrade to 736 kB to name a few. Ethernet connectivity is via a Xircom parallel port adapter – which is circa 1993. The operating system is IBM PC DOS 5.02. One thing to note is that all these upgrades were possible back in the mid-1980’s when the PCjr was still current. [Mike] could run the system with an MFM hard drive, an ISA ethernet card (via an adapter), and use the original CRT monitor. Older DOS versions would work too — though partition sizes would be limited. The “modern” conveniences are just to keep from wearing out vintage hardware which is quickly becoming rare.
The real glue that holds this all together is [Mike’s] own software: mTCP. mTCP is a full set of tools for running internet applications on systems running MS-DOS or a compatible OS. We’ve seen quite a few mTCP projects over the years. [Mike] has worked tirelessly testing the software, ensuring that it is stable and reliable.
Software is never perfect though – one thing [Mike] didn’t implement is a log roller. Since he has logging turned on, the PCjr was slowly filling up its hard drive. Once the drive was full, mTCP would perform an orderly shutdown — but the uptime will be reset. [Mike] was able to go in and switch off logging with DOS’s DEBUG command. A live patch is not the way one would normally update software – but the fact that he was able to do it shows how deep [Mike’s] knowledge of the software goes.
[Mike] has even provided a live stream recording of the little PCjr handling requests from all over the globe.
Continue reading “PCjr WebServer Hits 2500 Hours Uptime” →