Gather ’round children, we’re about to hear a story about the good old days. Except that this is really more of a horror story of what it used to be like as a code monkey. [John Graham-Cumming] shares his experience programming a 6502-based KIM-1 machine back in 1985. Simple, right? The caveat being that there was no assembler or hardware for loading the finished code!
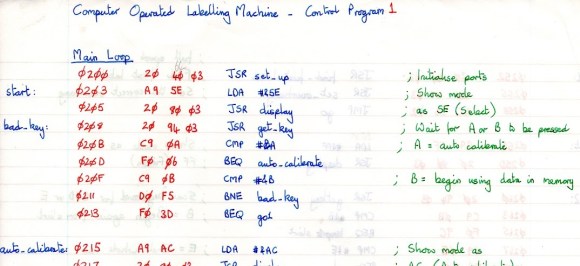
The machine in question was a label application tool for a production line. You know, product goes in bottle, label gets slapped on the side. But the slapping needed to be perfect because consumers shy away from packaging that looks shoddy. Computer control would end up being far superior than the mechanical means the factory had been using because it simplifies the ability to adjust calibration and other parameters. [John] started from square one by interfacing the KIM-1 with the existing hardware. It has a hex keyboard which is how the program was entered into the device. But first he wrote the software on sheets of notebook paper like the one seen above. It includes his hand assembled code, which was then typed in on the keypad. Kind of makes you appreciate all the tools you take for granted (like Eclipse), huh?
[via Reddit]