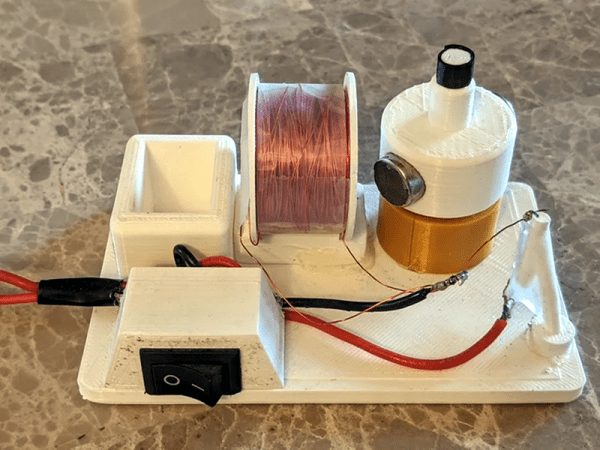
It used to be a staple of junior high physics class to build some sort of motor with paperclips or wire. A coil creates a magnetic field that makes the rotor move. In the process of moving, brushes that connect the coil to the rest of the circuit will reverse its polarity and change the magnetic field to keep the rotor turning. However, brushless motors work differently. The change in magnetic field comes from the drive controller, not from brushes. If you want to build that model, [Rishit] has you covered. You can see his 3D printed model brushless motor running in the video below.
Usually, you have a microcontroller determining how to drive the electromagnets. However, this model is simpler than that. There are two permanent magnets mounted to the shaft. One magnet closes a reed switch to energize the coil and the other magnet is in position for the coil to attract it, breaking the current. As the shaft turns, eventually the second magnet will trip the reed switch, and the coil will attract the first magnet. This process repeats over and over.
Continue reading “Take A 3D Printed Brushless Motor Demo For A Spin”