You have to be a pretty big aviation nerd to know about [Willard Ray Custer] and his channel wing concept, but if you are, you’ll be giddy to hear about the semicircular profile of the HopFlyt Cyclone drone’s tandem wings. If you’re not quite that much of a nerd, please keep reading, because it’s a really neat concept that never — er — quite got off the ground.
[Custer]’s idea was pretty simple, and born of a shift in reference frame — he realized that only the relative wind over the wing mattered, not the airspeed of the entire aircraft. The same idea drives every blown-wing short-takeoff-and-landing (STOL) project from the DHC-7 turboprop airliner to the An-72 cargo jet: air from the engines washes over the wings, creating lift. Where [Custer] went further is that rather than blowing air over a straight wing, he wrapped the wing under the propeller in a semicircle to maximize the area of lower pressure — and thus lift — creating the “channel wing” that bears his name.
Theoretically, an aircraft with channel wings and powerful enough engines might be able to do vertical takeoffs just from the blown lift, but none of [Custer]’s prototypes demonstrated that — just excellent short-field capability. The HopFlyt drone would be the same, except that, being a tandem, it has double the channel wings of [Custer]’s more-conventional designs, and it’s also a tilt-wing to boot. In that mode, the added low-speed lift from the channel wing makes transitions easier than they otherwise would be — which isn’t anything to sneeze at, since transitioning from vertical to horizontal flight has always been the real bane of VTOL projects.
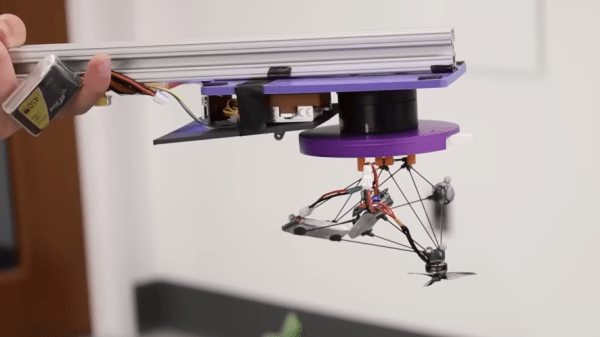
They’re claiming a reduced fuel burn of 10% in hover and transition thanks to the extra lift from the channel wings. You can see their prototype in action in the demo video embedded below. We once featured a project that went even further, blowing air across a special hollow wing for propulsion and blown lift. The easiest eVTOL project still starts with a quadcopter, though.
Continue reading “Custer’s Revenge: EVTOL Drone Brings Back Channel Wings” →